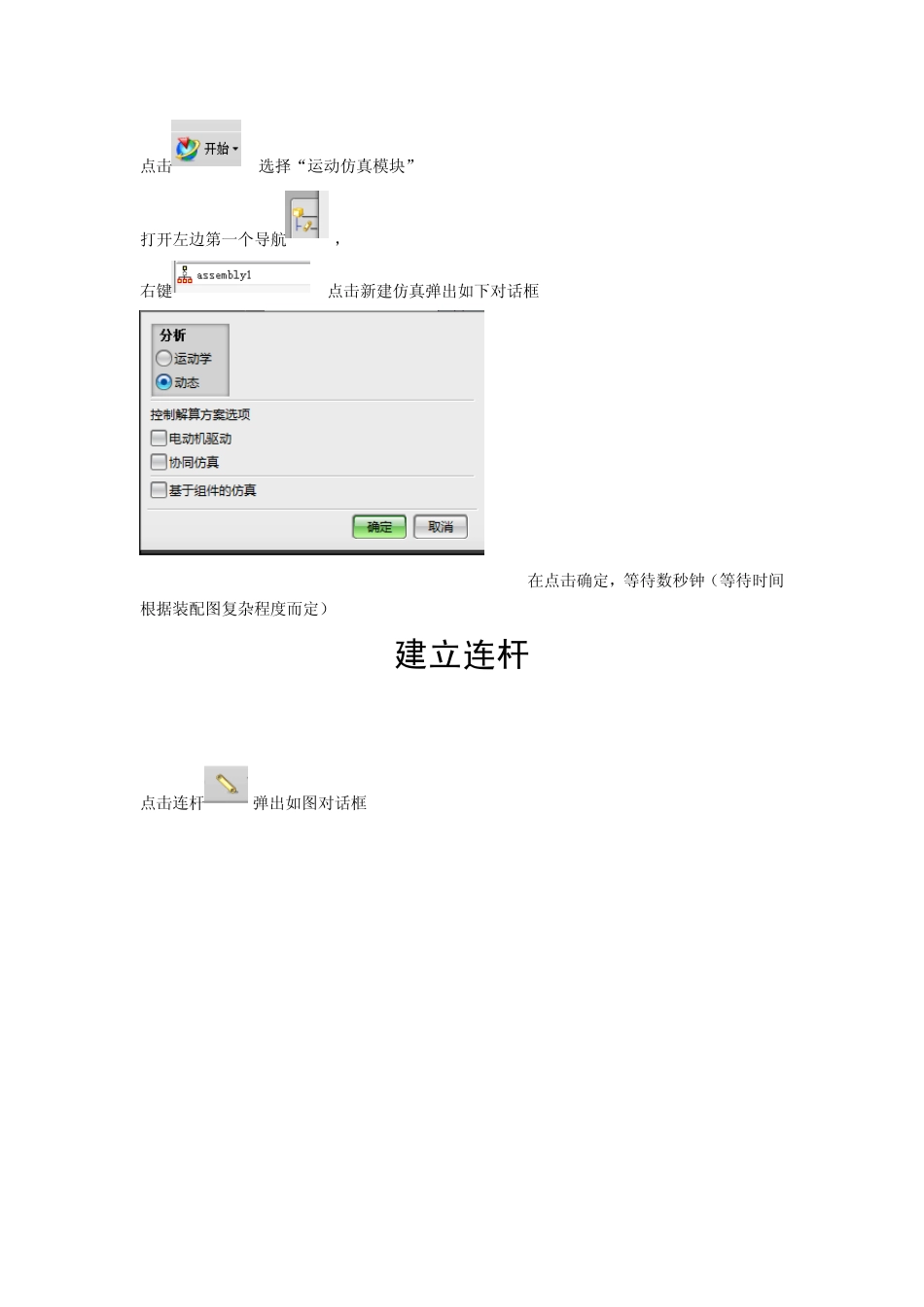
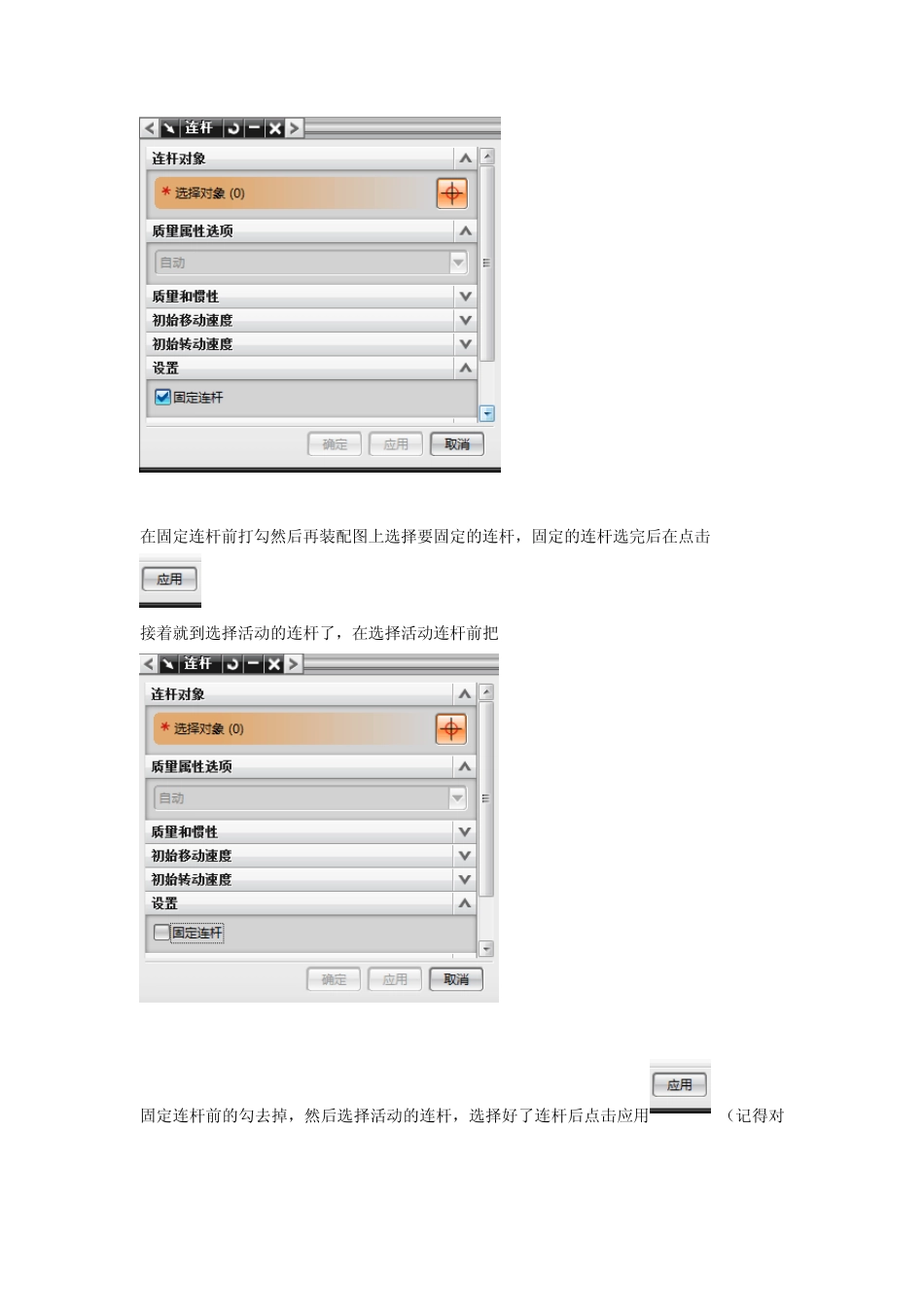
点击 选择“运动仿真模块” 打开左边第一个导航, 右键点击新建仿真弹出如下对话框 在点击确定,等待数秒钟(等待时间根据装配图复杂程度而定) 建立连杆 点击连杆弹出如图对话框 在固定连杆前打勾然后再装配图上选择要固定的连杆,固定的连杆选完后在点击 接着就到选择活动的连杆了,在选择活动连杆前把 固定连杆前的勾去掉,然后选择活动的连杆,选择好了连杆后点击应用(记得对话框固定连杆前的勾去掉,)接着在选择另一个连杆选完后再点击
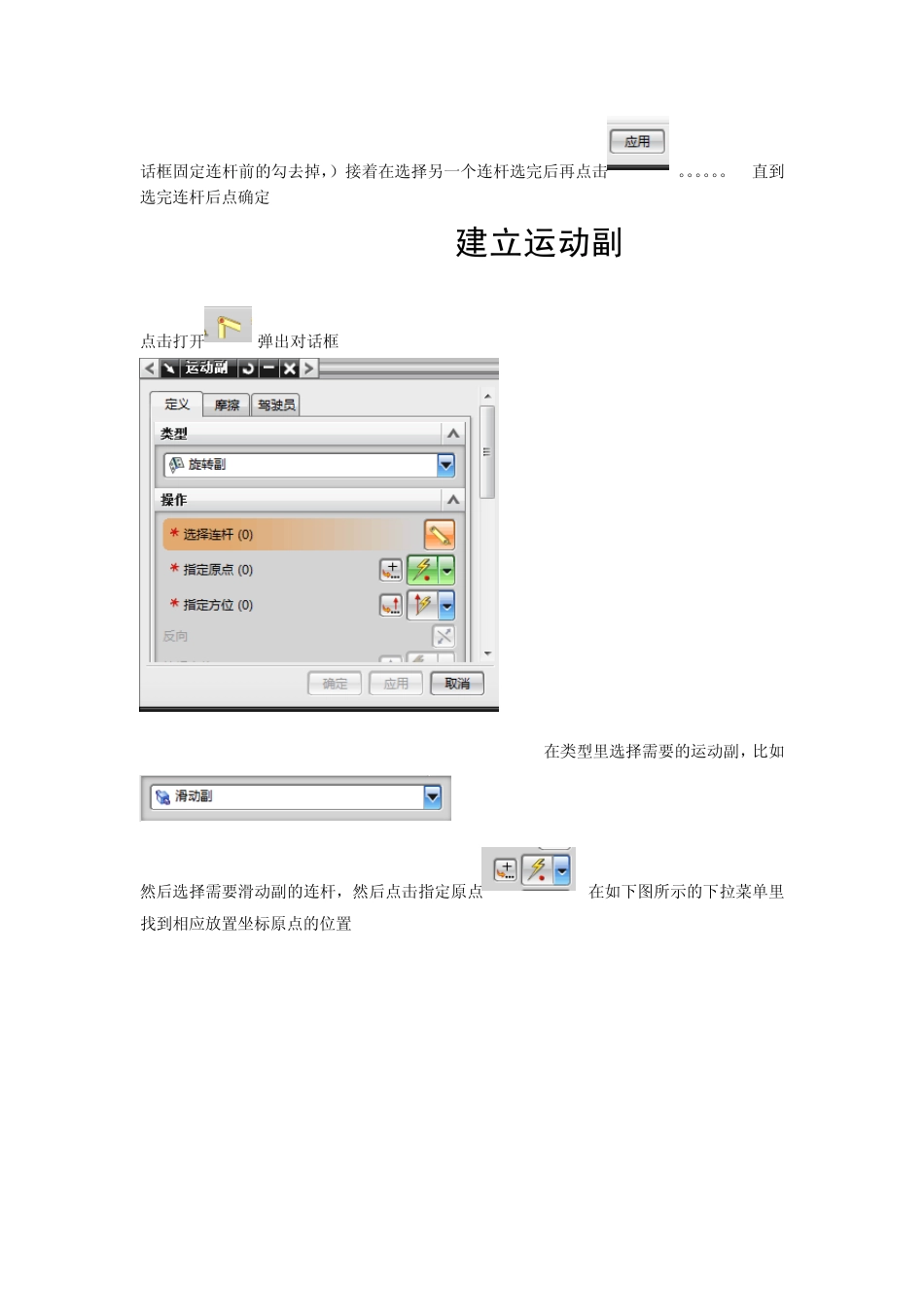
直到选完连杆后点确定 建立运动副 点击打开弹出对话框 在类型里选择需要的运动副,比如 然后选择需要滑动副的连杆,然后点击指定原点在如下图所示的下拉菜单里找到相应放置坐标原点的位置 选择好后,点击指定方位 然后点击在下拉菜单里选择相应的方向 点击驾驶员设置动力,弹出对话框,在平移下拉菜单里选择相应的运动要求,当要选择函数时,点击函数弹出对话框 接着点击再点击f(x )函数管理器,弹出对话框 点击新建 弹出对话框 在插入下拉菜单里选择需要的函数 在选择相应的函数然后在双击它,然后框中有相应的函数公式 在函数中填入相应的参数 如图所示 然后点击3 次确定,在在回到建模桌面,完成一个连杆的运动副及动力的设置 再设置一个滑动副 框在类型里选择需要的运动副,比如 然后选择需要滑动副的连杆,然后点击指定原点在如下图所示的下拉菜单里找到相应放置坐标原点的位置 选择好后,点击指定方位 然后点击在下拉菜单里选择相应的方向 点击驾驶员设置动力,弹出对话框,在平移下拉菜单里选择相应的运动要求,当要选择函数时,点击函数弹出对话框 接着点击再点击f(x )函数管理器,弹出对话框 点击新建 弹出对话框 在插入下拉菜单里选择需要的函数 在选择相应的函数然后在双击它,然后框中有相应的函数公式 在函数中填入相应的参数 如图所示 然后点击次确定选择刚建立的函数第二项函数,呈蓝色的 刚刚