高精度二维机械滑台 一、设计任务 1、两坐标行程为250m m ; 2、定位精度±0
01mm; 3、响应速度≥1
5m/s^2; 4、最高速度12m/min,最低速度1m/min
二、设计工作 1、运动设计 (1)要实现一个二维平面运动,只需将其分解为两个垂直方向的一维直线运动即可
如图所示: 由 X方向的直线位移机构带动 Y方向的直线位移机构沿 X向做直线运动,然后 X向直线位移机构不动,Y向直线位移机构在 X向直线位移机构上沿 Y向运动,这样就实现了 XOY平面的二维运动
(2)实现直线运动的主要途径有: (ⅰ)丝杆和直线导轨机构 (ⅱ)直线电机 (ⅲ)齿轮齿条机构 (ⅳ)曲柄滑块机构等方法等四种方法
评分标准(10分制) 0 1 2 3 4 5 6 7 8 9 10 不可用 差 较差 勉强可用 可用 中 良 较好 好 优 理想 各机构的评价分值表 性能指标 定位精度 运动速度 承载能力 效率 经济性 行程 总分 丝杆和直线导轨机构 9 9 8 10 7 9 52 直线电机 8 8 7 8 7 9 47 齿轮齿条机构 5 6 9 5 8 6 39 曲柄滑块机构 7 9 9 4 9 6 44 从上图可以看出,第一种方法——丝杆与直线导轨机构较符合
(3)总体设计方案图: 根据前文进行的运动设计,初步拟定用步进电机驱动滚珠丝杆,带动滚动导轨上工作做直线运动,采用开环控制系统进行点位控制,由脉冲数控制位移、脉冲频率控制工作台速度的方案
2、传动设计 机床传动系统是实现机床运动的
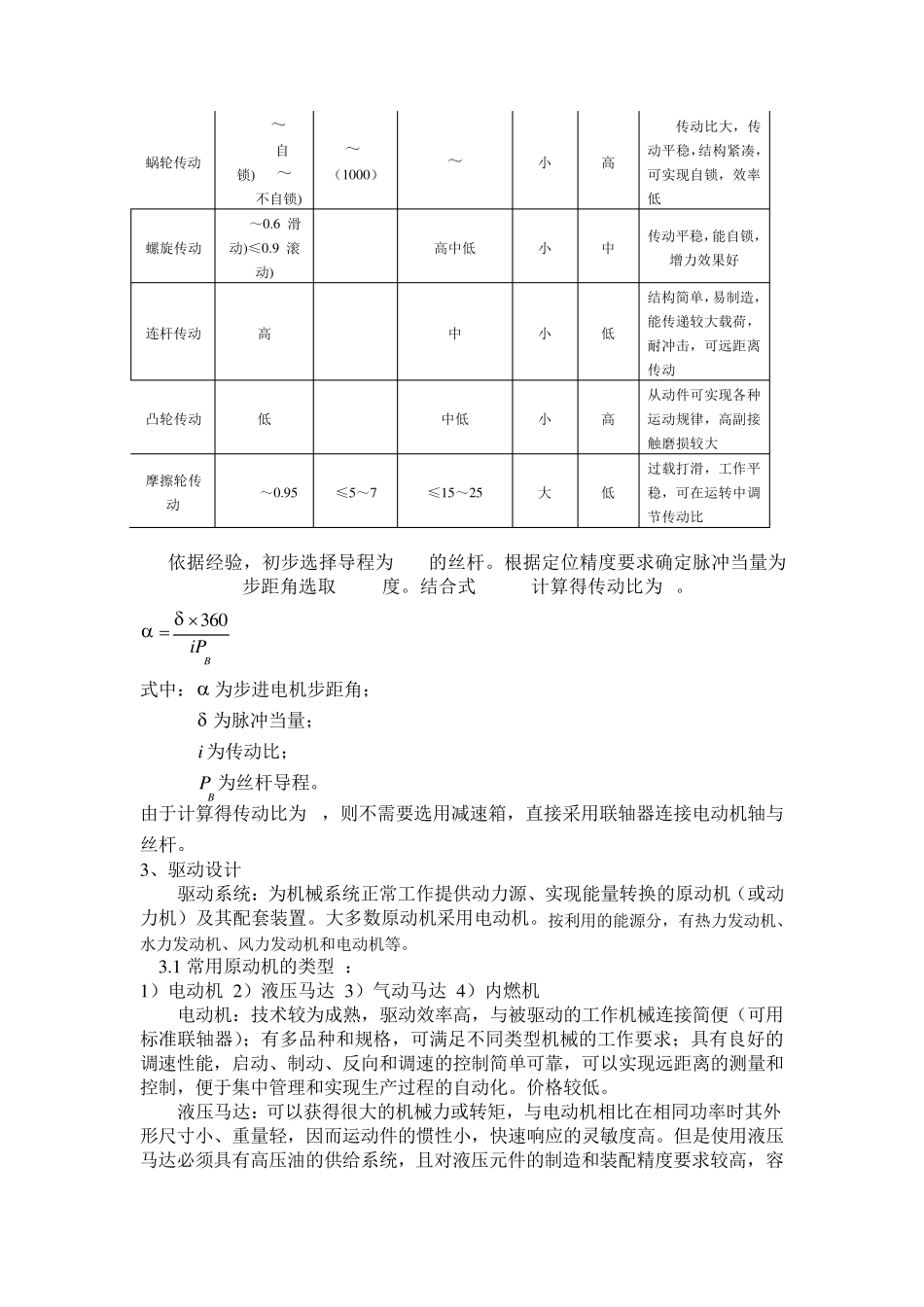
下图是各种传动类型的比较: 传动类型 传动效率 传动比 圆周速度 外廓尺寸 相对成本 性能特点 带传动 0
96(平带)0
97(V带) ≤5~7 5~25(30) 大 低 过载打滑,传动平稳,能缓冲吸振,不能保证定传动比,远距离传动 0
98(齿型带) ≤