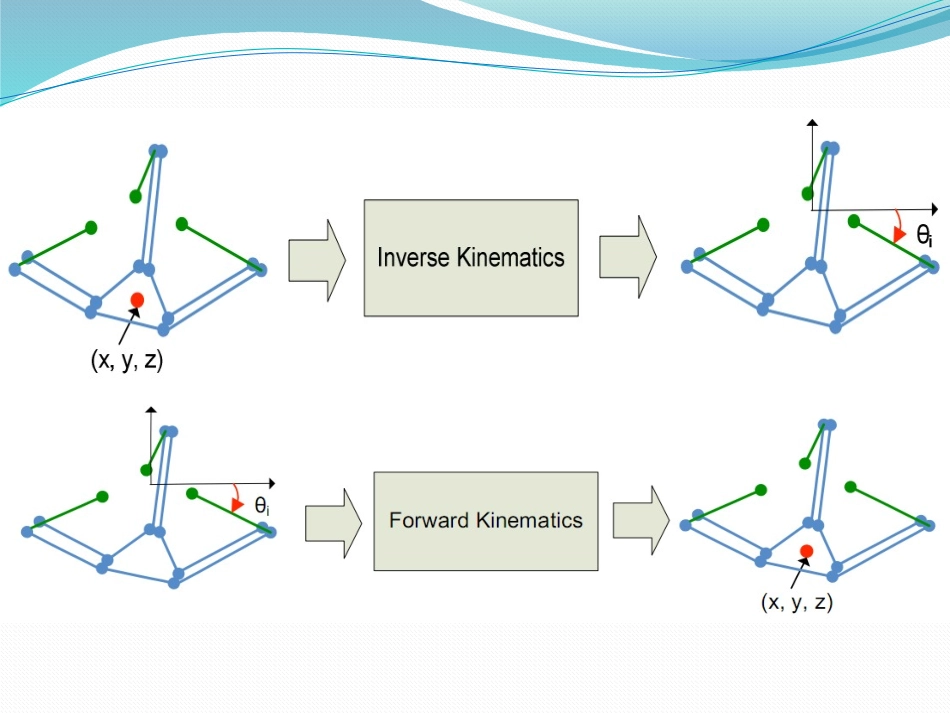
KinematicsAnalysisofaDeltaParalellRobotDelta机器人的反解算法详解InverseKinematics𝑙22−𝑥02=𝑙2′2(EQ-1)𝑑12+𝑑22=𝑙2′2(EQ-2)𝑑12+𝑑22=𝑙22−𝑥02𝑑1=¿𝑑2=𝑧0+𝑙1sin𝜃1(EQ-3)(EQ-4)(EQ-5)Substituting(4),(5)in(3),andsimplifyingWith(EQ-6)Substituting(6)intrigonometricidentities,Where,2𝑇𝑙11−𝑡21+𝑡2+2𝑧0𝑙12𝑡1+𝑡2=𝐾(EQ-7)(K+2T𝑙1)𝑡2+(−4𝑧0𝑙1)𝑡+(𝐾−2𝑇𝑙1)=0(EQ-8)SettingWeobtain(EQ-9)𝑡=−𝑒2±√𝑒22−4𝑒1𝑒32𝑒1)𝜃1=2tan−1(𝑡)=2tan−1(−𝑒2±√𝑒22−4𝑒1𝑒32𝑒1)i=2,∅2=120°i=3,∅3=240°¿[𝑥2𝑦2𝑧2][𝑥3𝑦3𝑧3]i=1,∅1=0°[𝑥1𝑦1𝑧1]𝑒1=K+2T𝑙1𝑒2=−4𝑧𝑖𝑙1𝑒3=K−2T𝑙1T=OA+𝑦𝑖−𝐺′𝐷′=𝑅−𝑦𝑖−𝑟K=𝑙22−𝑥𝑖2−𝑇2−𝑙12−𝑧𝑖2𝜃1𝜃2𝜃3𝜃𝑖=2tan−1(𝑡)=2tan−1(−𝑒2±√𝑒22−4𝑒1𝑒32𝑒1)(EQ-10)MultiplyPciwiththerotationalmatrix𝑅𝑧𝑖𝑅omittedForwardKinematics𝑂𝐹1=𝑂𝐹2=𝑂𝐹3=𝑓2√3𝐽1𝐽1′=𝐽2𝐽2′=𝐽3𝐽3′=𝑒2√3𝐹1𝐽1=𝑟𝑓cos𝜃1𝐹2𝐽2=𝑟𝑓cos𝜃2𝐹3𝐽3=𝑟𝑓cos𝜃3𝐽1′(0,−𝑓2√3−𝑟𝑓cos𝜃1+𝑒2√3,−𝑟𝑓sin𝜃1)𝐽2′([𝑓2√3+𝑟𝑓cos𝜃2−𝑒2√3]×cos𝜋6,[𝑓2√3+𝑟𝑓cos𝜃2−𝑒2√3]×sin