❖ 1-3 平面机构具有确定的运动条件是什么
答:必须使原动件数目等于机构的自由度数
❖ 1-5 试确定下列平面机构的自由度(图中绘有箭头的活动构件为原动件):a)推土机的推土机构;d)渣口堵塞机构;f)筛料机机构
❖ 解:a)推土机的推土机构 活动构件数n=5,低副PL=7(6 个转动副,一个移动副)高副PH=0
F=3×5-2×7-0 =1 等于原动件数 ∴ 有确定运动
❖ d) 渣口堵塞机构 由分析可知与杆 1 相连的滚子 2,属于局部自由度 ∴计算机构自由度时应排除
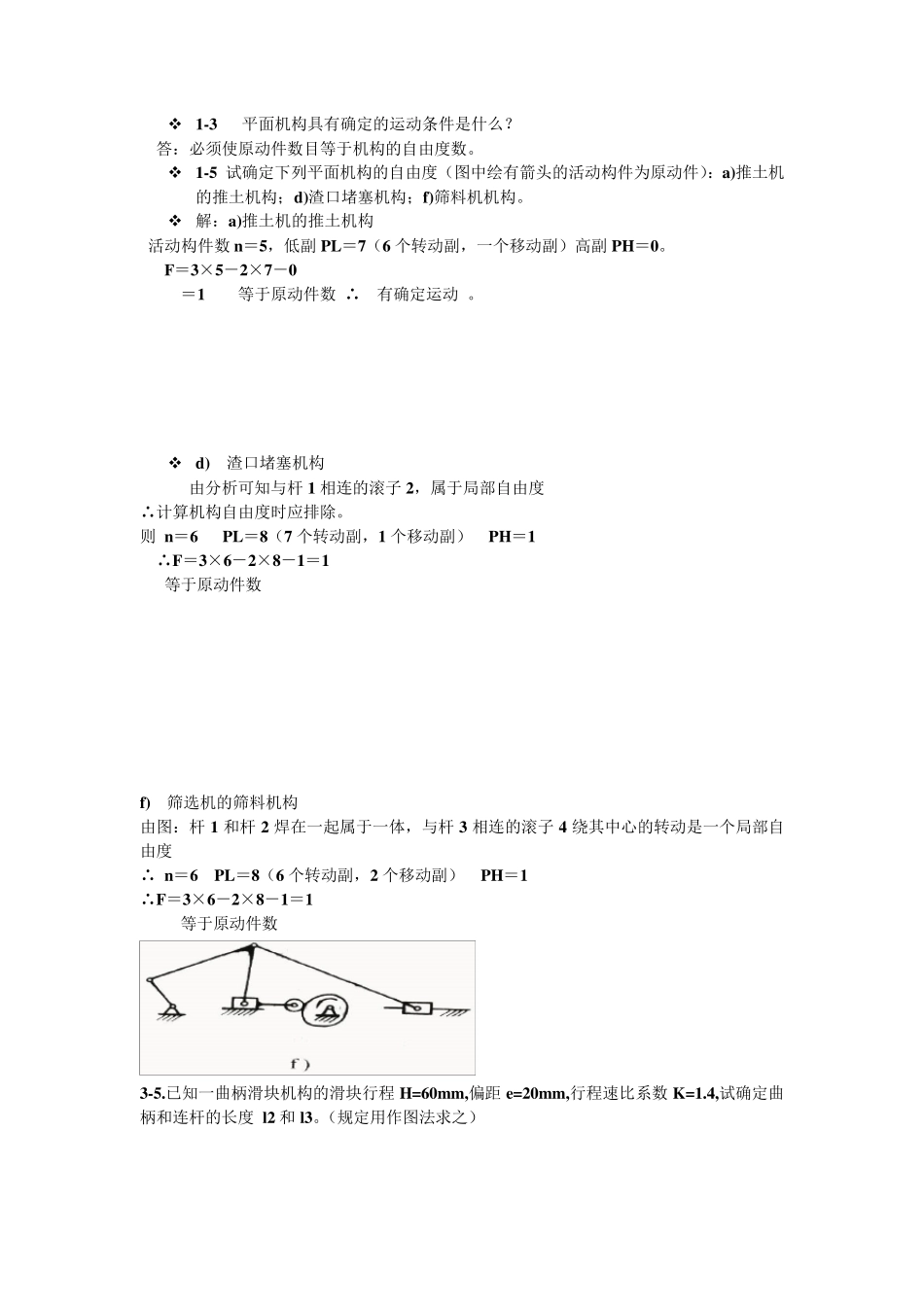
则 n=6 PL=8(7 个转动副,1 个移动副) PH=1 ∴F=3×6-2×8-1=1 等于原动件数 f) 筛选机的筛料机构 由图:杆 1 和杆 2 焊在一起属于一体,与杆 3 相连的滚子 4 绕其中心的转动是一个局部自由度 ∴ n=6 PL=8(6 个转动副,2 个移动副) PH=1 ∴F=3×6-2×8-1=1 等于原动件数 3-5
已知一曲柄滑块机构的滑块行程 H=60mm,偏距 e=20mm,行程速比系数K=1
4,试确定曲柄和连杆的长度 l2 和 l3
(规定用作图法求之) 解:(1) 由行程速比系数K,求出极位夹角θ
θ=180°×(K-1)/(K+1) =180°×(1
4-1) /(1
4+1)=30° 选比例尺 u=1:2,作图,可得: (2) 连接 C1 和 C2,并作 C1M 垂直于 C1C2,C1C2=H; (3) 作∠C1C2N=90°-θ=60°,C2N 与 C1M 相交于 P 点, 由图可见, ∠C1PC2=θ=30°; 4)作三角形 PC1C2 的外接圆 O,则曲柄的固定铰链中心 A 必在该圆上
(5)作与 C1C2 线相距为 e 的平行线,与外接圆 O 交于的点即为 A 点,连接 AC1、AC2,则∠C1AC2=θ
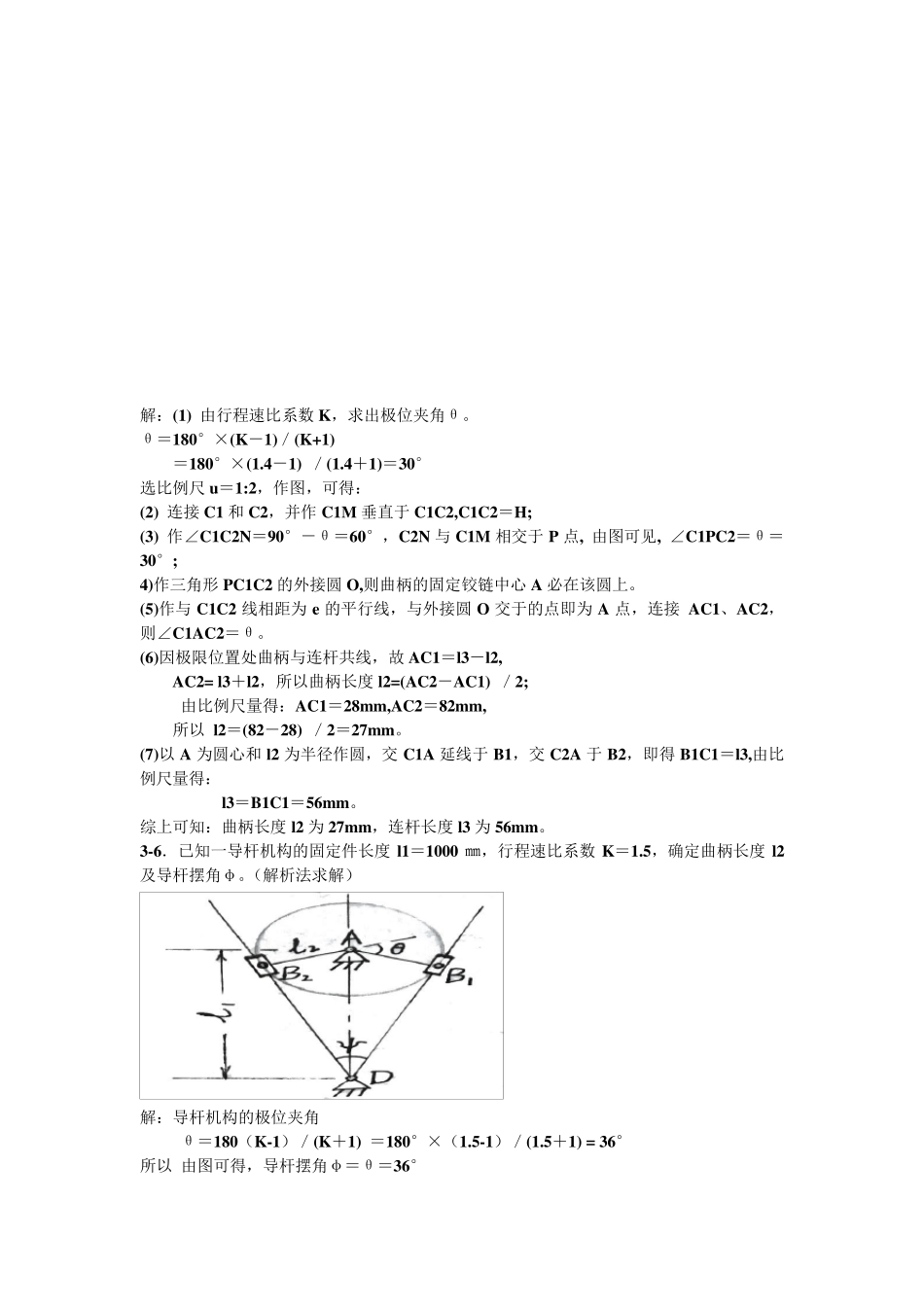
(6)因极限位置处曲柄与连杆共