机器人创新实验( 3)实验指导书机器人实验室实验一 熟悉机器人与 C51 单片机硬件软件一、实验目的1、掌握宝贝车机器人用C51 教学板与计算机硬件连接和宝贝车基本结构;2、熟悉及掌握 C51 系列单片机 Keil uVision IDE(集成开发环境) 软件、ISP下载软件及串口调试终端的使用方法
二、实验设备及软件宝贝车机器人套件、 ISP 下载线、串行接口线、计算机、电源
Keil uVision2 IDE 集成开发环境、 PROGISP1
72下载软件、串口调试软件
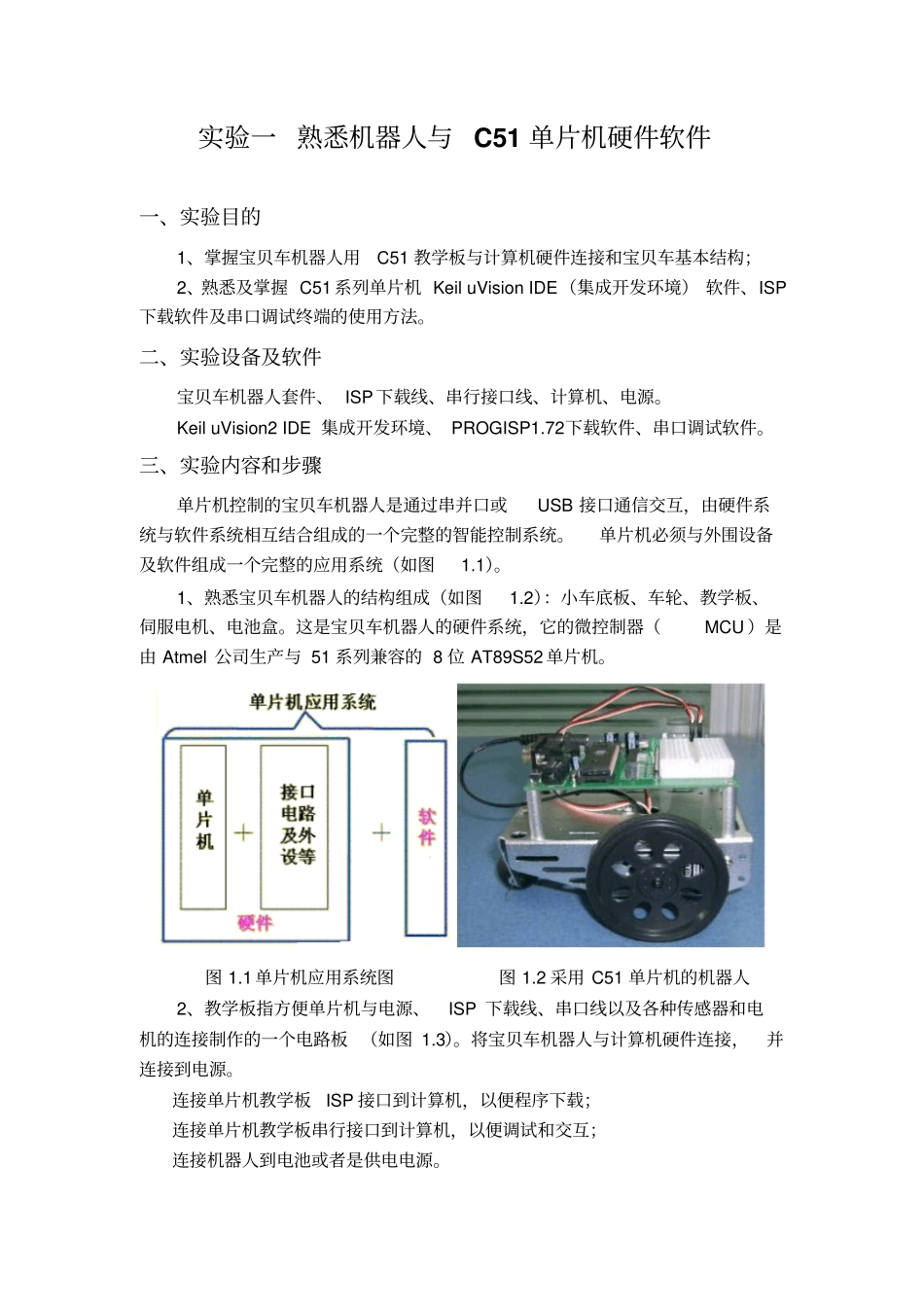
三、实验内容和步骤单片机控制的宝贝车机器人是通过串并口或USB 接口通信交互,由硬件系统与软件系统相互结合组成的一个完整的智能控制系统
单片机必须与外围设备及软件组成一个完整的应用系统(如图1
1、熟悉宝贝车机器人的结构组成(如图1
2):小车底板、车轮、教学板、伺服电机、电池盒
这是宝贝车机器人的硬件系统,它的微控制器(MCU )是由 Atmel 公司生产与 51 系列兼容的 8 位 AT89S52 单片机
1 单片机应用系统图图 1
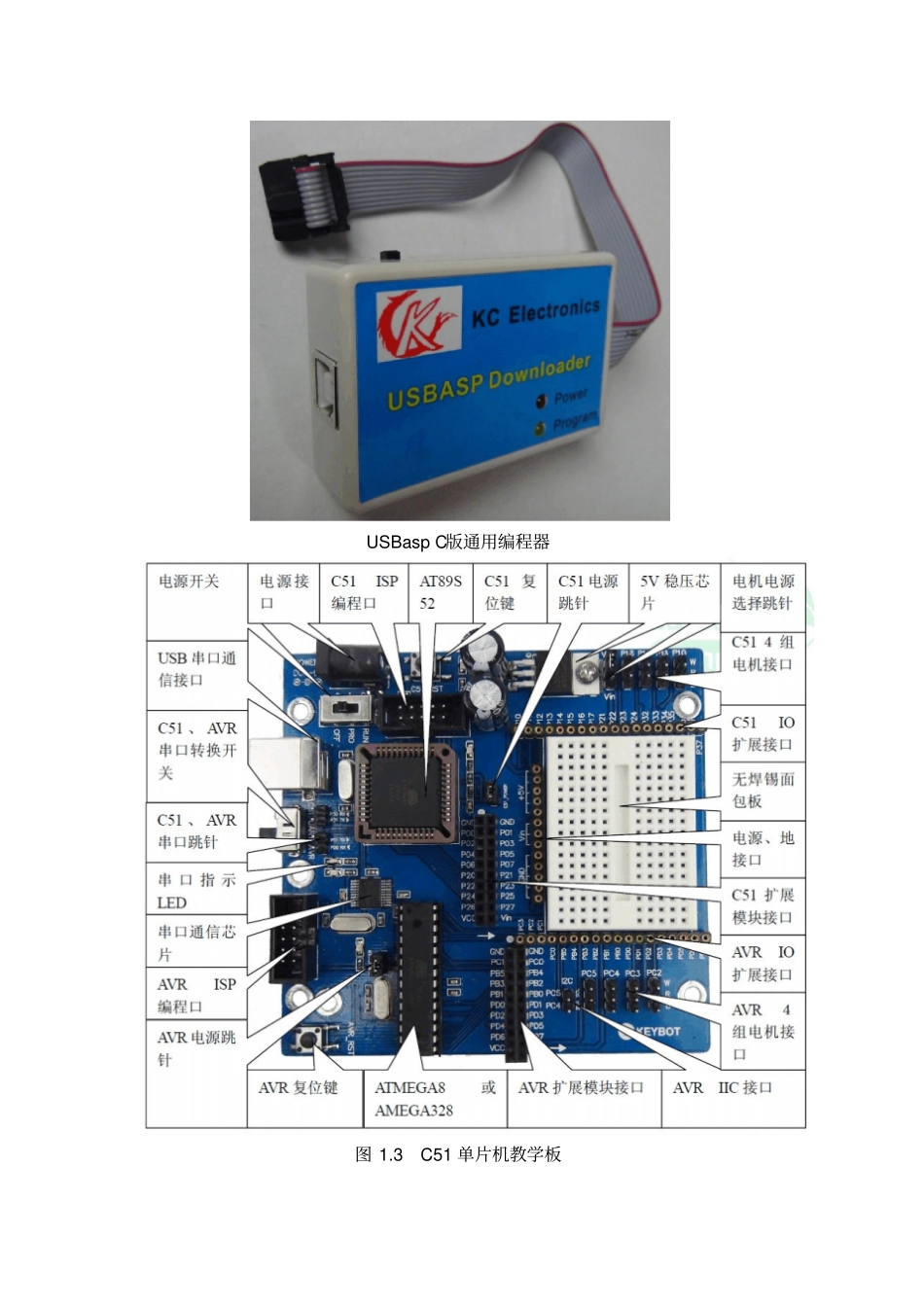
2 采用 C51 单片机的机器人2、教学板指方便单片机与电源、ISP 下载线、串口线以及各种传感器和电机的连接制作的一个电路板 (如图 1
将宝贝车机器人与计算机硬件连接,并连接到电源
连接单片机教学板ISP 接口到计算机,以便程序下载;连接单片机教学板串行接口到计算机,以便调试和交互;连接机器人到电池或者是供电电源
USBasp C版通用编程器图 1
3 C51 单片机教学板3、运用 C 语言编程,运用编译器编译生成可执行文件并下载到单片机,用串口调试软件查看单片机输出信息
①建立用户文件夹,方便管理程序,拷入编译所需头文件(例如,将光盘“头文件”文件夹中的文件拷贝到C:\Program Files\Keil\C51\INC 文件夹里)