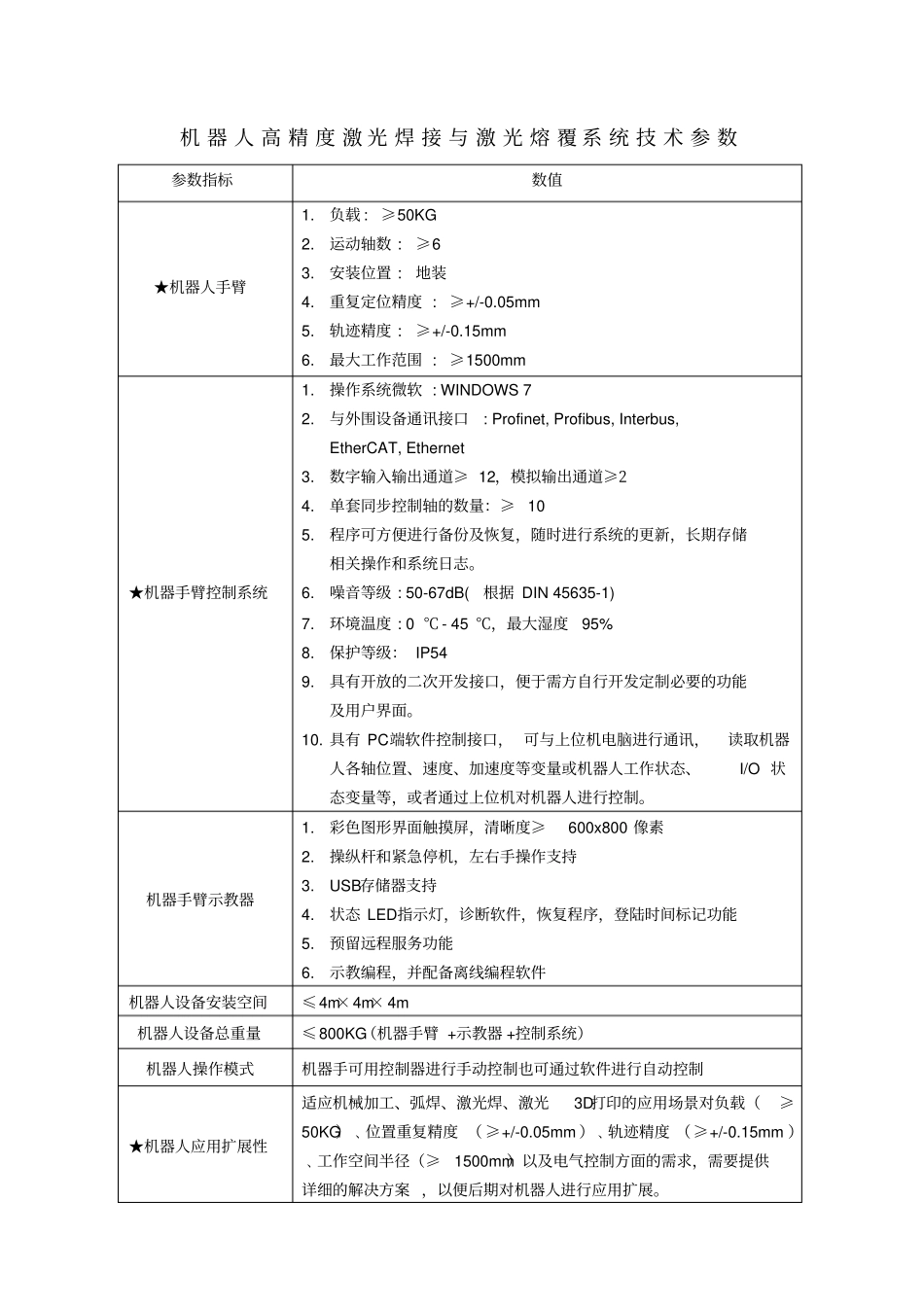
机 器 人 高 精 度 激 光 焊 接 与 激 光 熔 覆 系 统 技 术 参 数参数指标数值★机器人手臂1
负载 : ≥50KG 2
运动轴数 : ≥6 3
安装位置 : 地装4
重复定位精度 : ≥+/-0
05mm 5
轨迹精度 : ≥+/-0
15mm 6
最大工作范围 : ≥1500mm ★机器手臂控制系统1
操作系统微软 : WINDOWS 7 2
与外围设备通讯接口: Profinet, Profibus, Interbus, EtherCAT, Ethernet 3
数字输入输出通道≥ 12,模拟输出通道≥24
单套同步控制轴的数量:≥105
程序可方便进行备份及恢复,随时进行系统的更新,长期存储相关操作和系统日志
噪音等级 : 50-67dB(根据 DIN 45635-1) 7
环境温度 : 0 ℃ - 45 ℃,最大湿度95% 8
保护等级: IP54 9
具有开放的二次开发接口,便于需方自行开发定制必要的功能及用户界面
具有 PC端软件控制接口, 可与上位机电脑进行通讯,读取机器人各轴位置、速度、加速度等变量或机器人工作状态、I/O 状态变量等,或者通过上位机对机器人进行控制
机器手臂示教器1
彩色图形界面触摸屏,清晰度≥600x800 像素2
操纵杆和紧急停机,左右手操作支持3
USB存储器支持4
状态 LED指示灯,诊断软件,恢复程序,登陆时间标记功能5
预留远程服务功能6
示教编程,并配备离线编程软件机器人设备安装空间≤4m×4m× 4m 机器人设备总重量≤800KG(机器手臂 +示教器 +控制系统)机器人操作模式机器手可用控制器进行手动控制也可通过软件进行自动控制★机器人应用扩展性适应机械加工、弧焊、激光焊、激光3D打印的应用场景对负载(≥50KG)﹑位置重复精度 ( ≥+/-0
05mm )﹑轨迹精度 (≥+/-0
15mm )﹑