第五届全国大学生机械创新设计大赛参赛作品设计说明书项 目 名 称室 内 物 品 取 送 机 器 人指 导 教 师张 宝 成项目负责人陈伟所 属 单 位中北大学机械工程与自动化学院室内物品取送机器人设计说明书一、作品内容简介该室内物品取送机器人根据人发出的指示,可以实现从指定位置取回物品,或者从人所在的位置将物品取走,放回到指定位置, 也可以实现人与人之间的物品传递
二、产品研制背景与意义目前,人口老龄化已经成为世界范围的重大社会问题,其中60 岁以上的人口增长速度最快
同时,截至2011 年底,我国 60 岁以上的老年人口达到1
85 亿,占总人口的 13
人口的加速老龄化使医疗和社会保险系统面临前所未有的压力,高龄老年人的自我照料能力差,行动和语言的能力下降,所以需要给予他们特别的护理
各类残疾人和长期卧床老年人的大量存在,使得助老、助残问题日益成为一个重大的社会问题
研制开发助老、 助残机器人产品,为老年人和残疾人提供诸如护理、陪伴等方面的服务,不仅能够提高老年人的生活质量,而且有助于老年人的心理健康,改善他们的精神状态
我国助老、助残机器人的研究目前还处于刚刚起步的阶段
此外,随着生活节奏的加快,人们不断追求更高质量的服务
鉴于此,我们特设计出这款室内物品取送机器人,融合了运动控制、多传感器组合、路径规划等技术,以更好地协助行动不便的老年人或残疾人,同时也能方便未来的生活
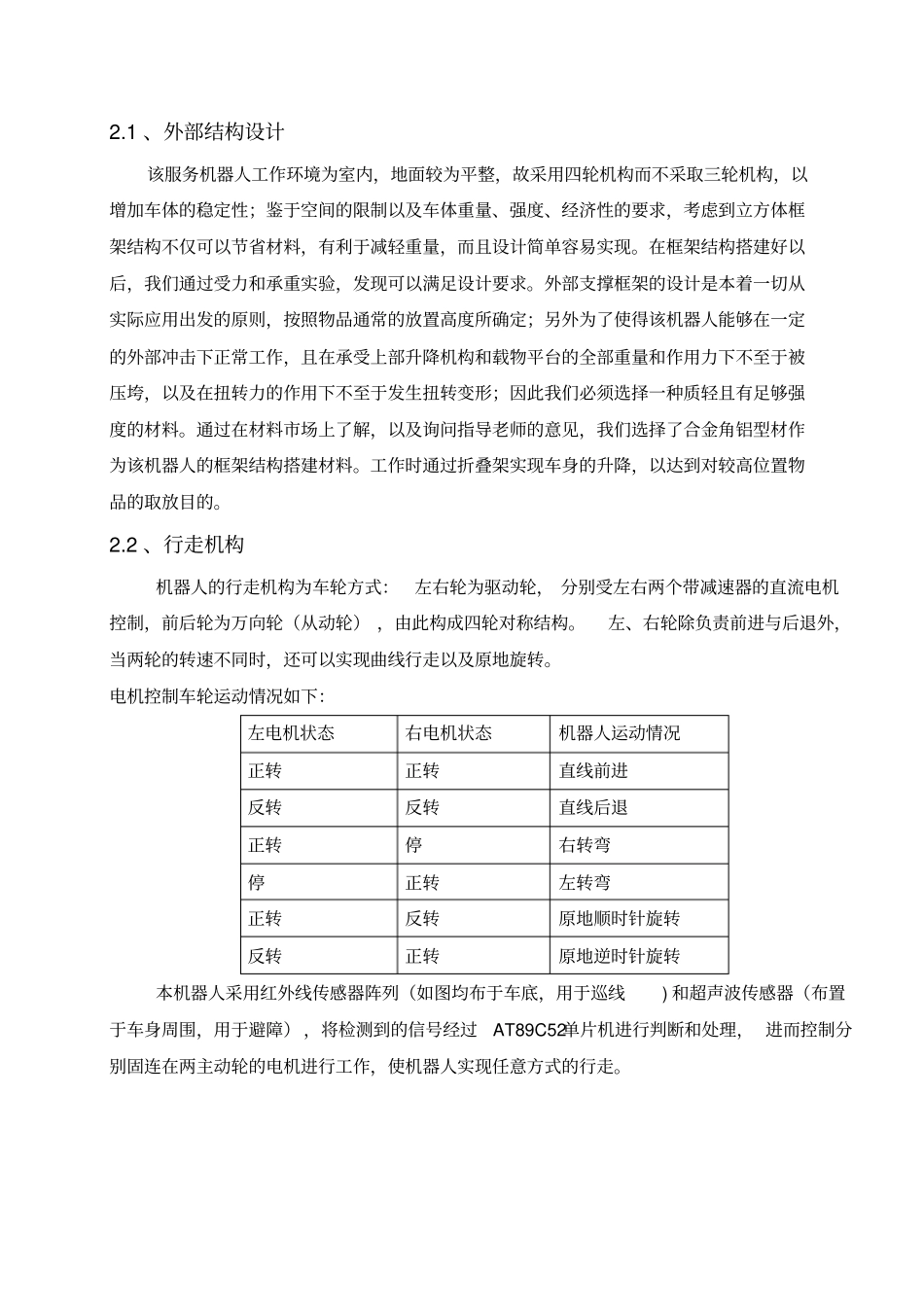
三、 设计方案1、作品设计简介它采用两驱四轮机构,两驱动轮各由一个直流电机控制,大大增加了车体的灵活性
采用折叠连杆机构,通过电动机驱动螺杆,进而带动螺母使连杆的支点分离与靠拢,实现载物平台的升降,结构简单稳定
考虑到机械臂的多自由度控制程序不易编写,故采用柔性机械手的线驱动控制, 以模仿人手实现对物体的抓取
它以51系列单片机 AT89C52作为检测和控制核心,采用红外光电传感器进行巡线以