机电一体化系统设计试题课程代码:02245 一、单项选择题 ( 本大题共 14 小题,每小题 1 分,共 14 分) 在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在题后的括号内
受控变量是机械运动的一种反馈控制系统称( ) A
顺序控制系统B
工业机器人2
齿轮传动的总等效惯量随传动级数( ) A
增加而减小B
增加而增加C
减小而减小D
变化而不变3
滚珠丝杠螺母副结构类型有两类:外循环插管式和( ) A
内循环插管式B
外循环反向器式 C
内、外双循环 D
内循环反向器式4
某光栅的条纹密度是100条/mm,光栅条纹间的夹角θ =0
001 孤度,则莫尔条纹的宽度是 ( ) A
100mm B
20mm C
10mm D
直流测速发电机输出的是与转速( ) A
成正比的交流电压B
成反比的交流电压 C
成正比的直流电压D
成反比的直流电压6
电压跟随器的输出电压 ( ) 输入电压
大于等于 C
某 4 极交流感应电动机,电源频率为50Hz,当转差率为 0
02 时,其转速为( ) A
1450[r/min ] B
1470 [r/min ]C
735[r/min ]D
2940[r/min ]8
右图称 ( ) A
直流伺服电动机调节特性B
直流伺服电动机机械特性C
直流伺服电动机动态特性 D
直流伺服电动机调速特性9
计算步进电动机转速的公式为( ) C
一般说来,如果增大幅值穿越频率ω c 的数值,则动态性能指标中的调整时间 ts( ) A
已知 f(t)=a+bt,则它的拉氏变换式为 ( ) 12
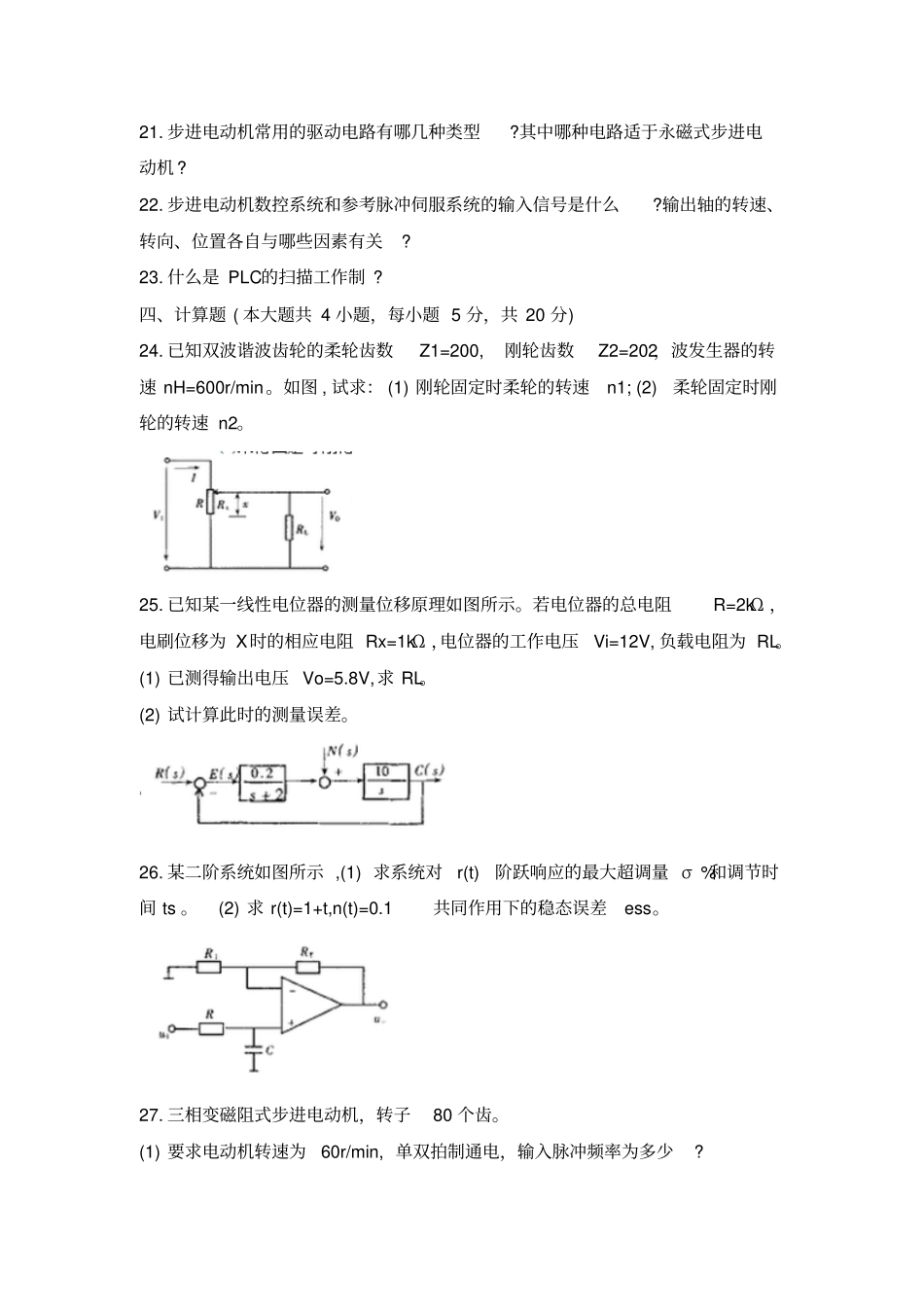
连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制每一个轴的 ( )