创建好腿部骨骼和反转脚 2
创建腿部ik 控制器 3
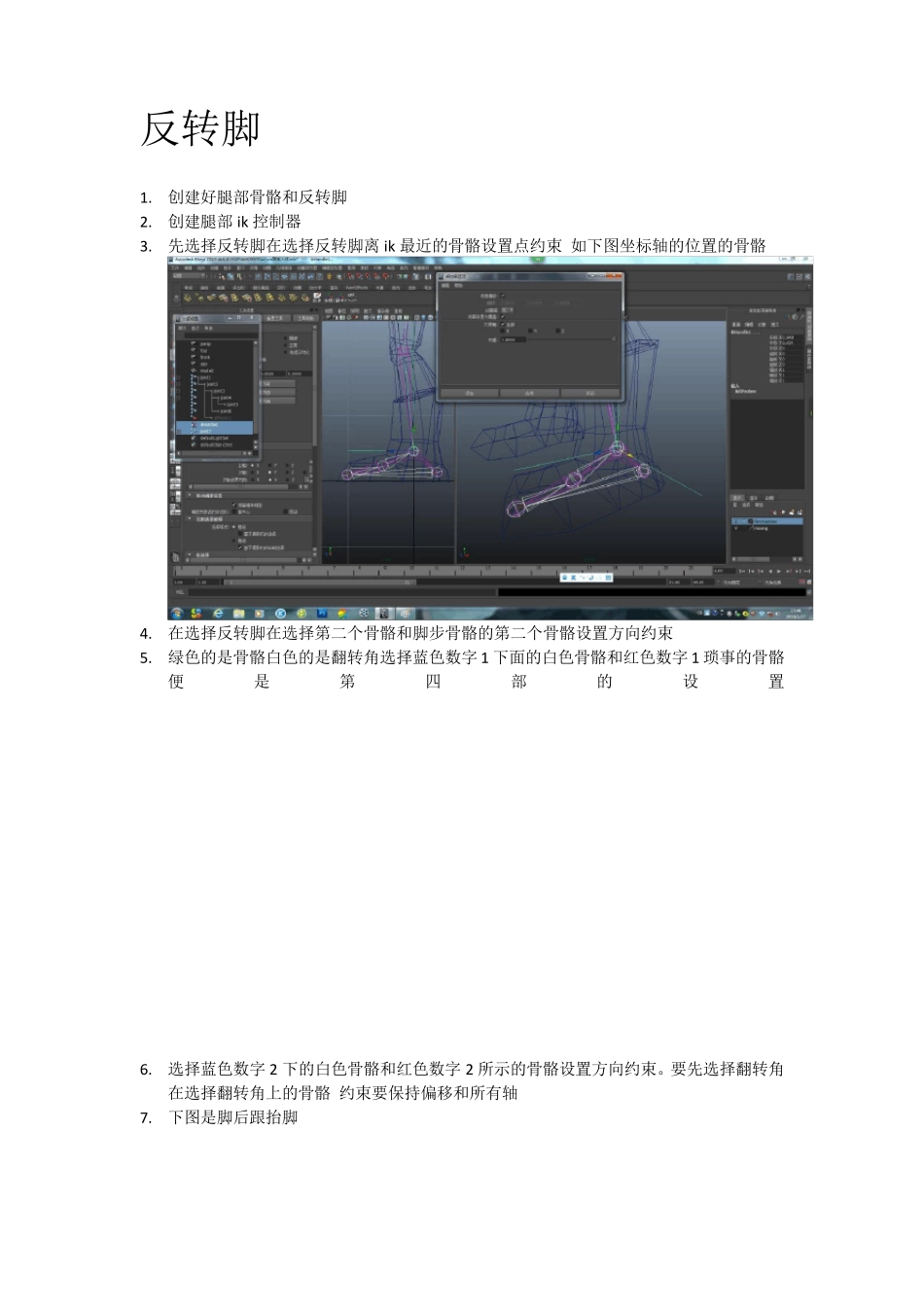
先选择反转脚在选择反转脚离ik 最近的骨骼设置点约束 如下图坐标轴的位置的骨骼 4
在选择反转脚在选择第二个骨骼和脚步骨骼的第二个骨骼设置方向约束 5
绿色的是骨骼白色的是翻转角选择蓝色数字1 下面的白色骨骼和红色数字1 琐事的骨骼便是第四部的设置 6
选择蓝色数字2 下的白色骨骼和红色数字2 所示的骨骼设置方向约束
要先选择翻转角在选择翻转角上的骨骼 约束要保持偏移和所有轴 7
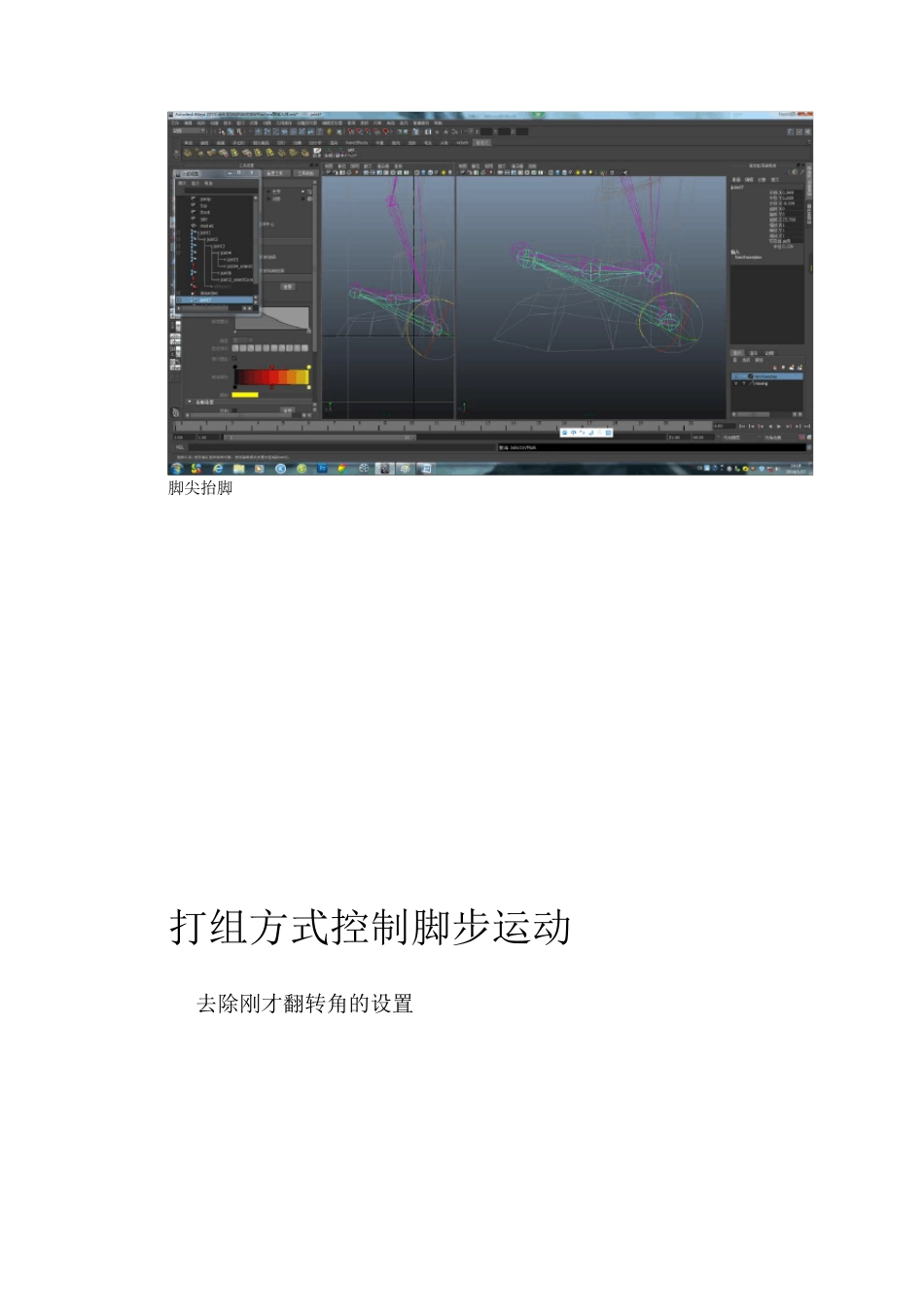
下图是脚后跟抬脚 脚尖抬脚 打组方式控制脚步运动 去除刚才翻转角的设置 1
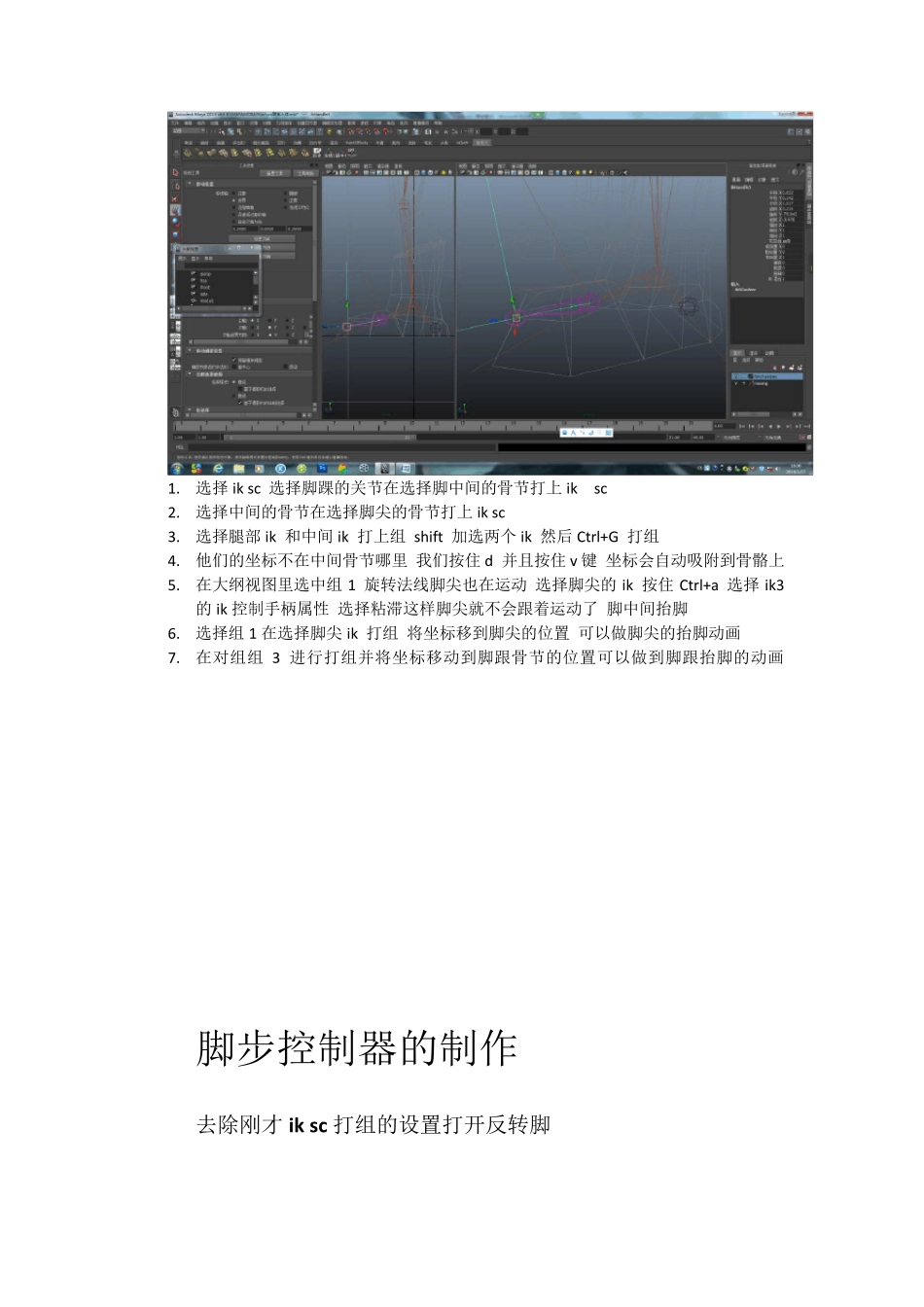
选择ik sc 选择脚踝的关节在选择脚中间的骨节打上 ik sc 2
选择中间的骨节在选择脚尖的骨节打上 ik sc 3
选择腿部 ik 和中间ik 打上组 shift 加选两个 ik 然后 Ctrl+G 打组 4
他们的坐标不在中间骨节哪里 我们按住 d 并且按住 v 键 坐标会自动吸附到骨骼上 5
在大纲视图里选中组 1 旋转法线脚尖也在运动 选择脚尖的ik 按住 Ctrl+a 选择ik3的ik 控制手柄属性 选择粘滞这样脚尖就不会跟着运动了 脚中间抬脚 6
选择组 1 在选择脚尖 ik 打组 将坐标移到脚尖的位置 可以做脚尖的抬脚动画 7
在对组组 3 进行打组并将坐标移动到脚跟骨节的位置可以做到脚跟抬脚的动画 脚步控制器的制作 去除刚才 ik sc 打组的设置打开反转脚 用曲线做出和脚形状类似的形状 先选择反转脚在选择线 按p 键将反转脚和曲线做个父子约束 选择曲线将中心调到脚跟位置 按d 键 v 键就可以 膝关节控制器的制作 选择创建-文本 输入l 为左脚的控制器 选择l 按住d 键将坐标调到中间 然后按住v 键 将他吸附到膝关节的位置 在往前来一 点 距 离 清 除 历 史 冻 结 变 换 选择控制器选择ik 选择极向