1 / 4 《 2014 浙江大学自动控制原理考研复习精编》历年考研真题试卷浙江大学 2007 年招收攻读硕士学位研究生入学考试试题考试科目:自动控制原理编号: 845 注意:答案必须写在答题纸上,写在试卷或草稿纸上均无效
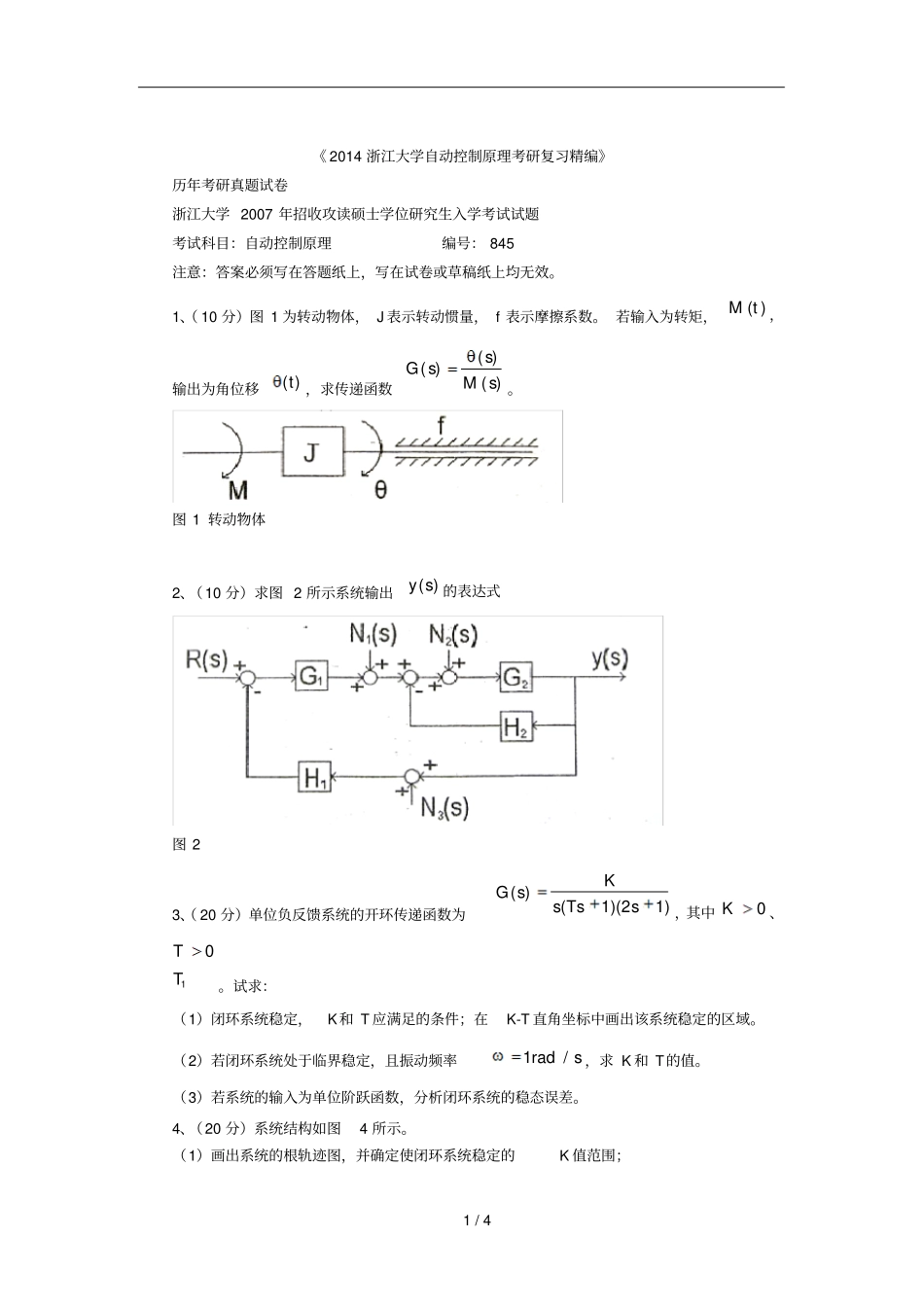
1、( 10 分)图 1 为转动物体, J 表示转动惯量, f 表示摩擦系数
若输入为转矩,( )M t,输出为角位移( )t,求传递函数( )( )( )sG sM s
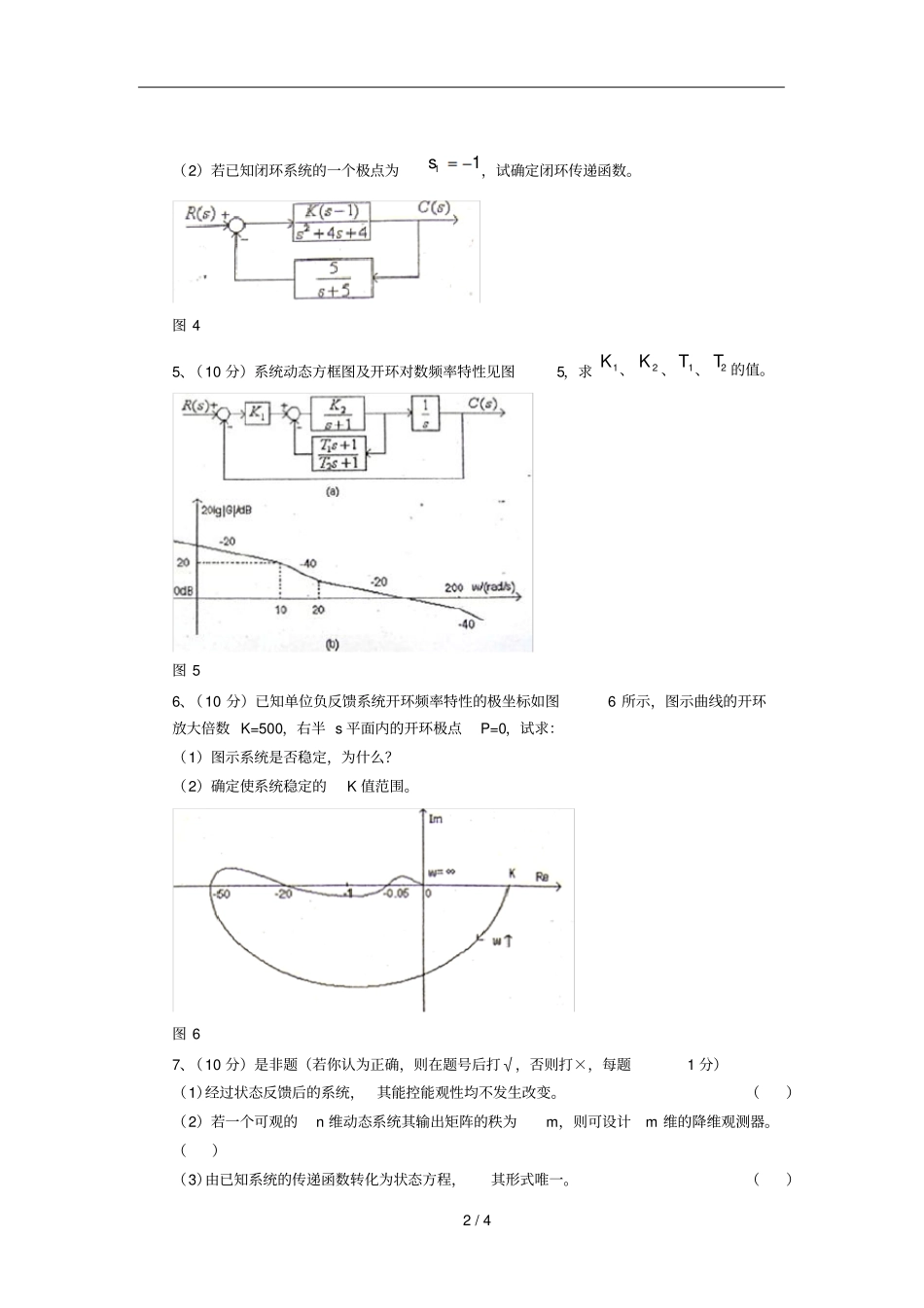
图 1 转动物体2、(10 分)求图 2 所示系统输出( )y s 的表达式图 2 3、( 20 分)单位负反馈系统的开环传递函数为( )(1)(21)KG ss Tss,其中0K、10TT
试求:(1)闭环系统稳定,K和 T 应满足的条件;在K-T 直角坐标中画出该系统稳定的区域
(2)若闭环系统处于临界稳定,且振动频率1/rads ,求 K 和 T的值
(3)若系统的输入为单位阶跃函数,分析闭环系统的稳态误差
4、(20 分)系统结构如图4 所示
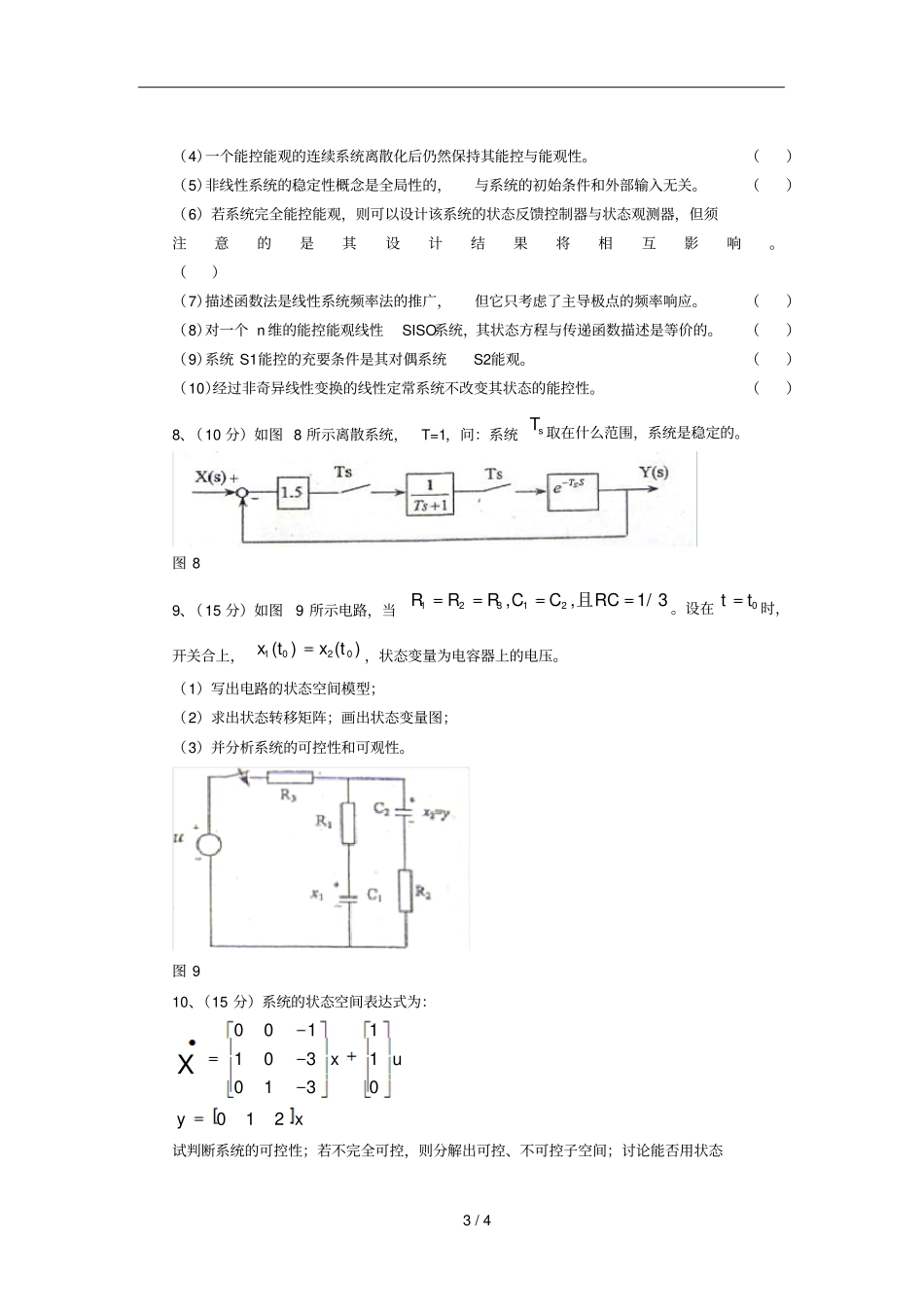
(1)画出系统的根轨迹图,并确定使闭环系统稳定的K 值范围;2 / 4 (2)若已知闭环系统的一个极点为11s,试确定闭环传递函数
图 4 5、(10 分)系统动态方框图及开环对数频率特性见图5,求1K 、2K 、1T 、2T 的值
图 5 6、(10 分)已知单位负反馈系统开环频率特性的极坐标如图6 所示,图示曲线的开环放大倍数 K=500,右半 s 平面内的开环极点P=0,试求:(1)图示系统是否稳定,为什么
(2)确定使系统稳定的K 值范围
图 6 7、(10 分)是非题(若你认为正确,则在题号后打√,否则打×,每题1 分)(1)经过状态反馈后的系统,其能控能观性均不发生改变
()(2)若一个可观的n 维动态系统其输出矩阵的秩为m,则可设计m 维的降维观测器
()(3)由已知系统的传递函数转化为状态方程,其形式唯一