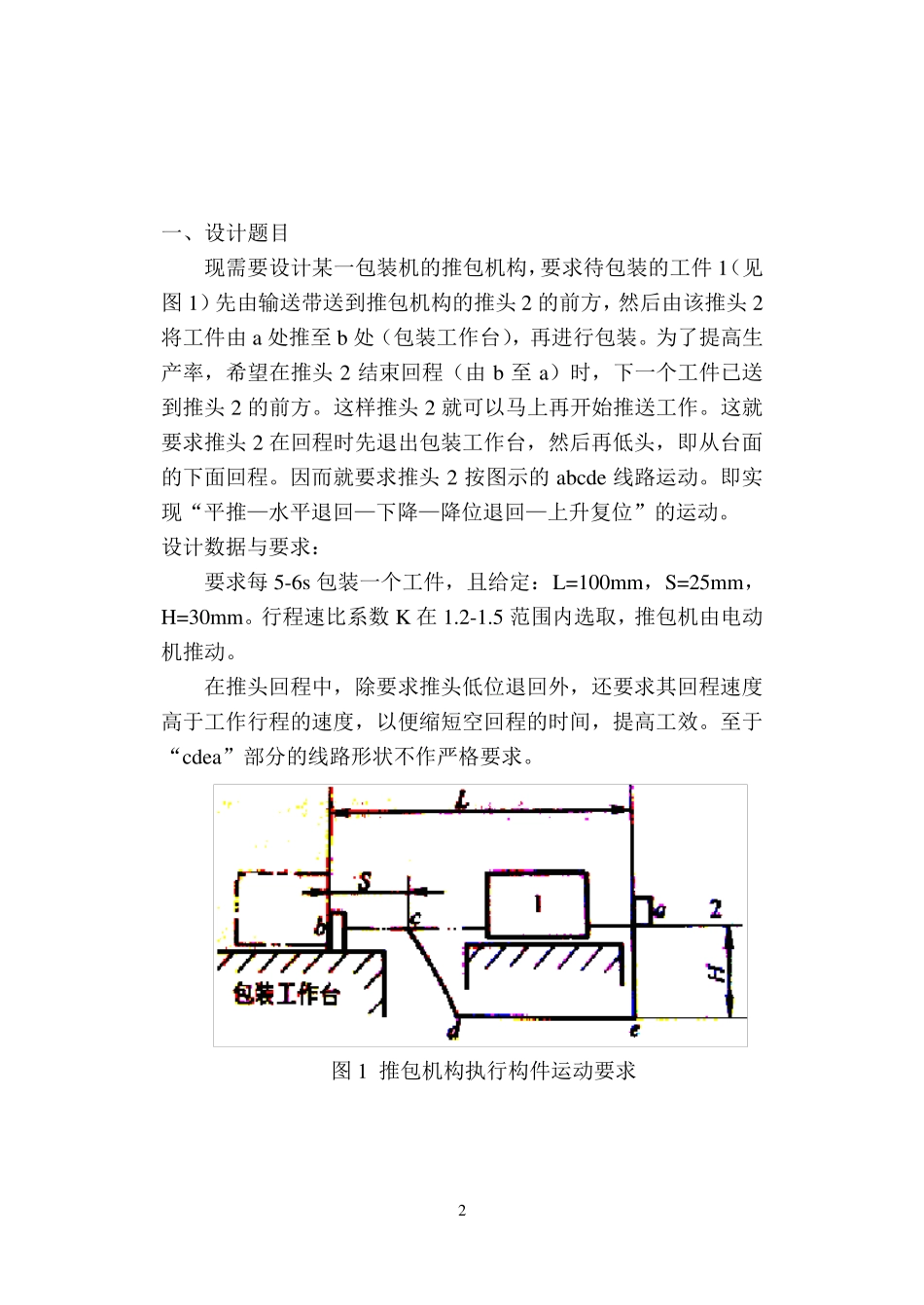
1 目 录 一、设计题目···································2 二、设计方案的选定·····························3 三、机构的设计·································6 1 、偏置滑块机构的设计······················6 2 、直动滚子从动件盘形凸轮轮廓设计··········7 四、电动机的选定及传动系统方案的设计···········9 1 、电动机转速、功率的确定··················9 2 、传动系统的设计··························9 五、小结以及对这次课程设计的心得体会···········1 2 六、参考文献···································1 2 2 一、设计题目 现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2 的前方,然后由该推头2将工件由a 处推至b 处(包装工作台),再进行包装
为了提高生产率,希望在推头2 结束回程(由b 至a)时,下一个工件已送到推头2 的前方
这样推头2 就可以马上再开始推送工作
这就要求推头2 在回程时先退出包装工作台,然后再低头,即从台面的下面回程
因而就要求推头2 按图示的abcde 线路运动
即实现“平推—水平退回—下降—降位退回—上升复位”的运动
设计数据与要求: 要求每 5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm
行程速比系数 K 在1
5 范围内选取,推包机由电动机推动
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效
至于“cdea”部分的线路形状不作严格要求
图1 推包机构执行构件运动要求