下载后可任意编辑平面 2 自由度并联机器人的运动学和动力学讨论林协源 1 刘冠峰 1( 1
广东工业大学 广州 ) 摘要: 本文面对高速高精 LED 电子封装设备设计了一种高速高精 2 自由度平面并联机构( 2-PPa 并联机器人)
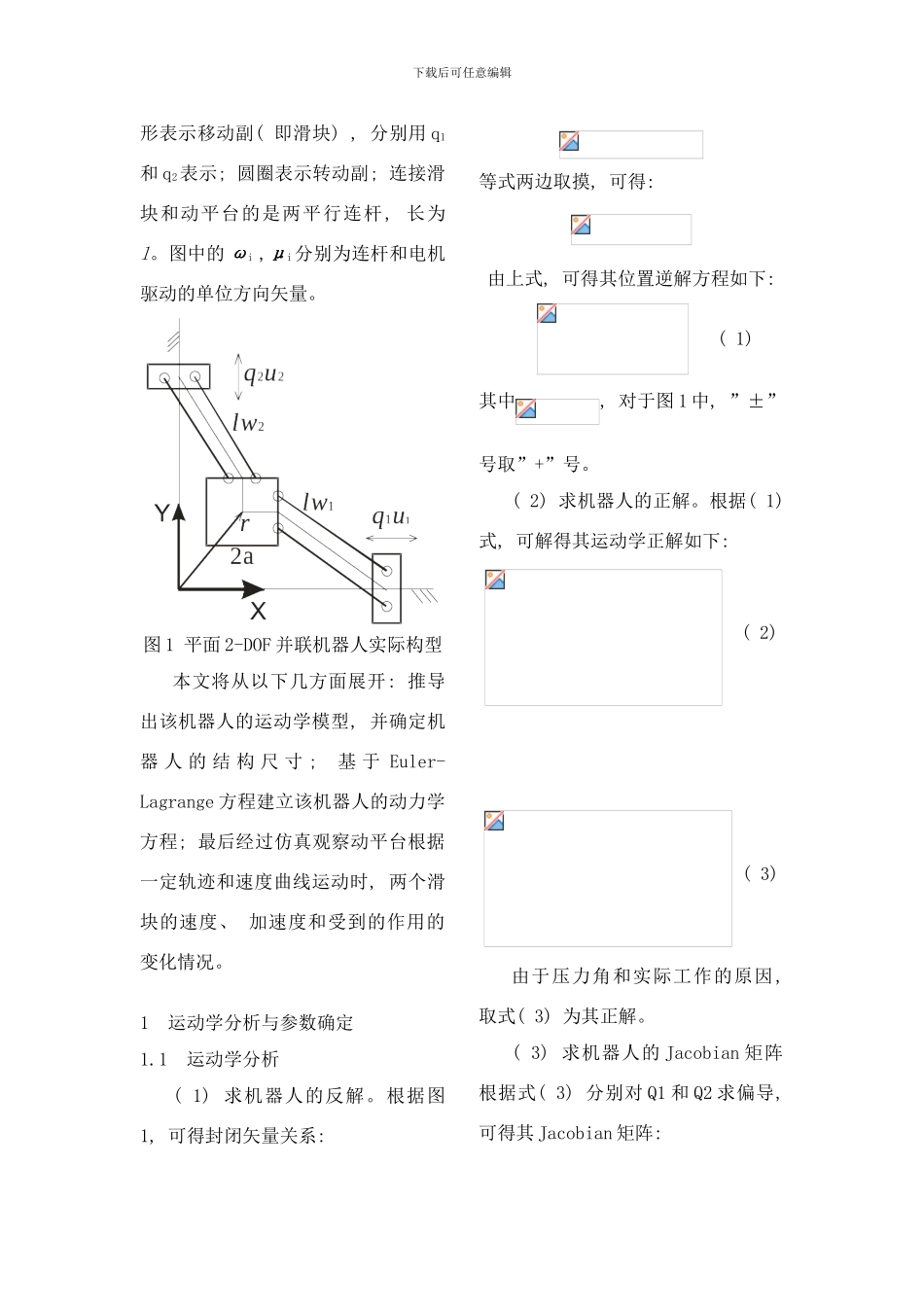
该机构由一个动平台和两个对称分布的完全相同的支链组成, 每个支链中都有一个移动副(驱动关节)和一个由平面平行四边形组成的特别转动动副
首先推导出该机器人的运动学模型包括正反解; 其次结合焊线机实际工艺要求提出多项机构性能指标对该机构的几何参数进行多目标优化; 然后基于 Euler-Lagrange 方程建立该机器人的动力学方程, 最后经过算例分析两个移动副在动平台根据一定轨迹运动时其速度、 加速度和驱动力的变化规律
这些为接下来讨论该机器人的动态性能和系统解耦控制等都具有重要意义
关键词: 2 自由度 平面并联机器人 运动学 动力学Kinematic and Dynamic Analysis of a Planar Two-degree-freedom Parallel ManipulatorLIN Xieyuan1 LIU Guanfeng1 ( 1
Guangdong University of Technology Guangzhou ) Abstract: In this paper, a type of planar 2-DOF parallel manipulator is proposed for uses in design of high- speed and high-accuracy LED packaging machines
The manipulator consists of a moving platform and two identical subchains
Each subchain is made