组合导航系统是将载体( 飞机、舰船等 ) 上的导航设备组合成一个统一的系统, 利用两种或两种以上的设备提供多重信息,构成一个多功能、高精度的冗余系统
组合导航系统有利于充分利用各导航系统进行信息互补与信息合作, 成为导航系统发展的方向
在所有的组合导航系统中,以北斗与惯性导航系统INS 组合的系统最为理想 , 而深组合方式是北斗与惯性导航系统( INS) 组合的最优方法
鉴于 GPS 的不可依赖性,北斗卫星导航系统与INS 的组合是我国组合导航系统的发展趋势,我国自主研制北斗 /INS 深组合导航系统需要解决的关键技术
1北斗/惯导深组合导航算法深组合导航算法是由INS 导航结果推算出伪距、 伪距率,与北斗定位系统观测得到的伪距、 伪距率作差得到观测量
通过卡尔曼滤波对 INS 的误差和北斗接收机的误差进行最优估计,并根据估计出的INS 误差结果对 INS 进行反馈校正 , 使 INS 保持高精度的导航
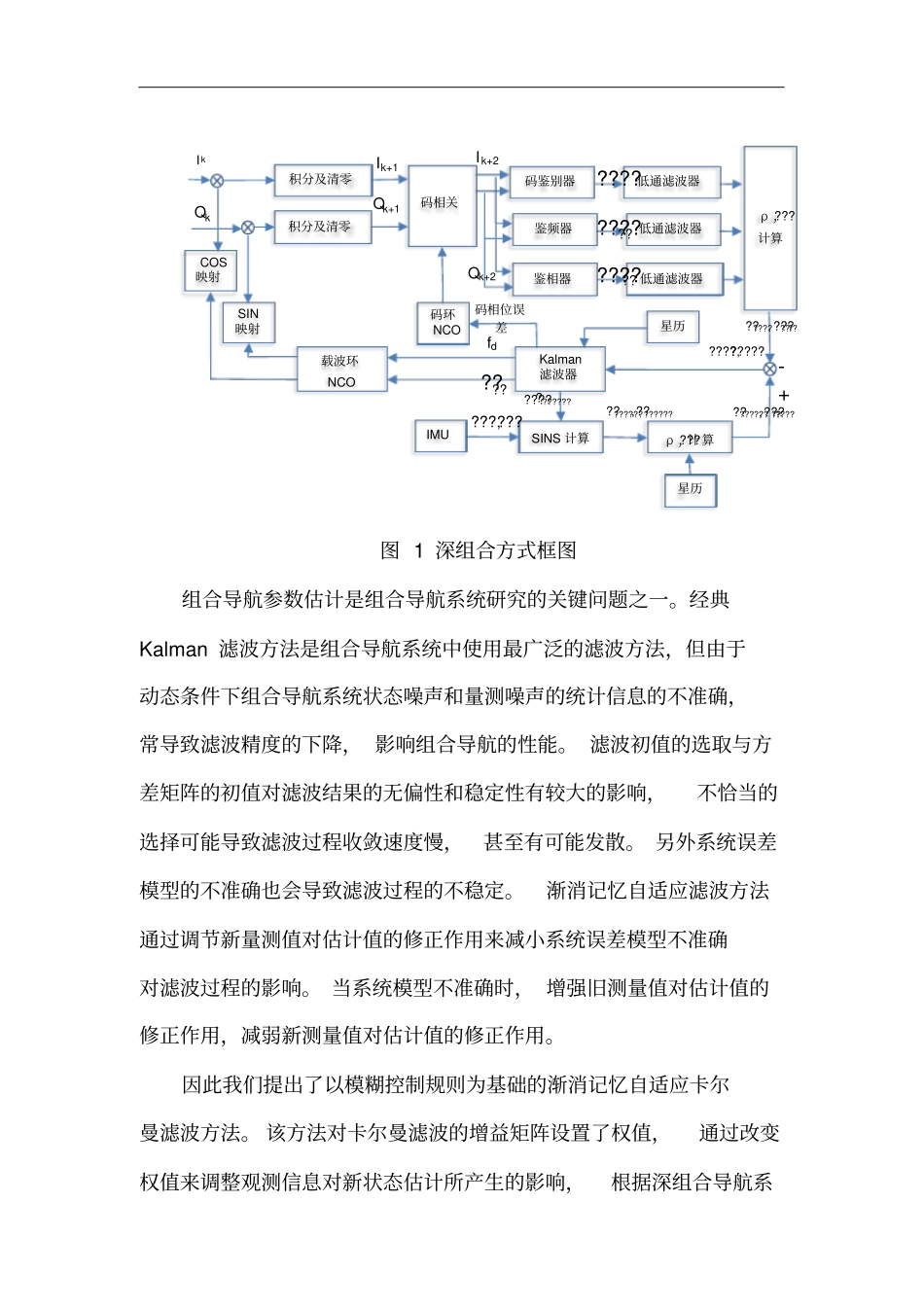
同时利用校正后的INS 速度信息对北斗接收机的载波环、码环进行辅助跟踪, 消除载波跟踪环和码跟踪环中载体的大部分动态因素, 以降低载波跟踪环和码跟踪环的阶数,从而减小环路的等效带宽, 增加北斗接收机在高动态或强干扰环境下的跟踪能力
其组合方式如图 1 所示,图中只画出了北斗的一个通道,其他通道均相同
图 1 深组合方式框图组合导航参数估计是组合导航系统研究的关键问题之一
经典Kalman 滤波方法是组合导航系统中使用最广泛的滤波方法,但由于动态条件下组合导航系统状态噪声和量测噪声的统计信息的不准确,常导致滤波精度的下降, 影响组合导航的性能
滤波初值的选取与方差矩阵的初值对滤波结果的无偏性和稳定性有较大的影响,不恰当的选择可能导致滤波过程收敛速度慢,甚至有可能发散
另外系统误差模型的不准确也会导致滤波过程的不稳定
渐消记忆自适应滤波方法通过调节新量测值对估计值的修