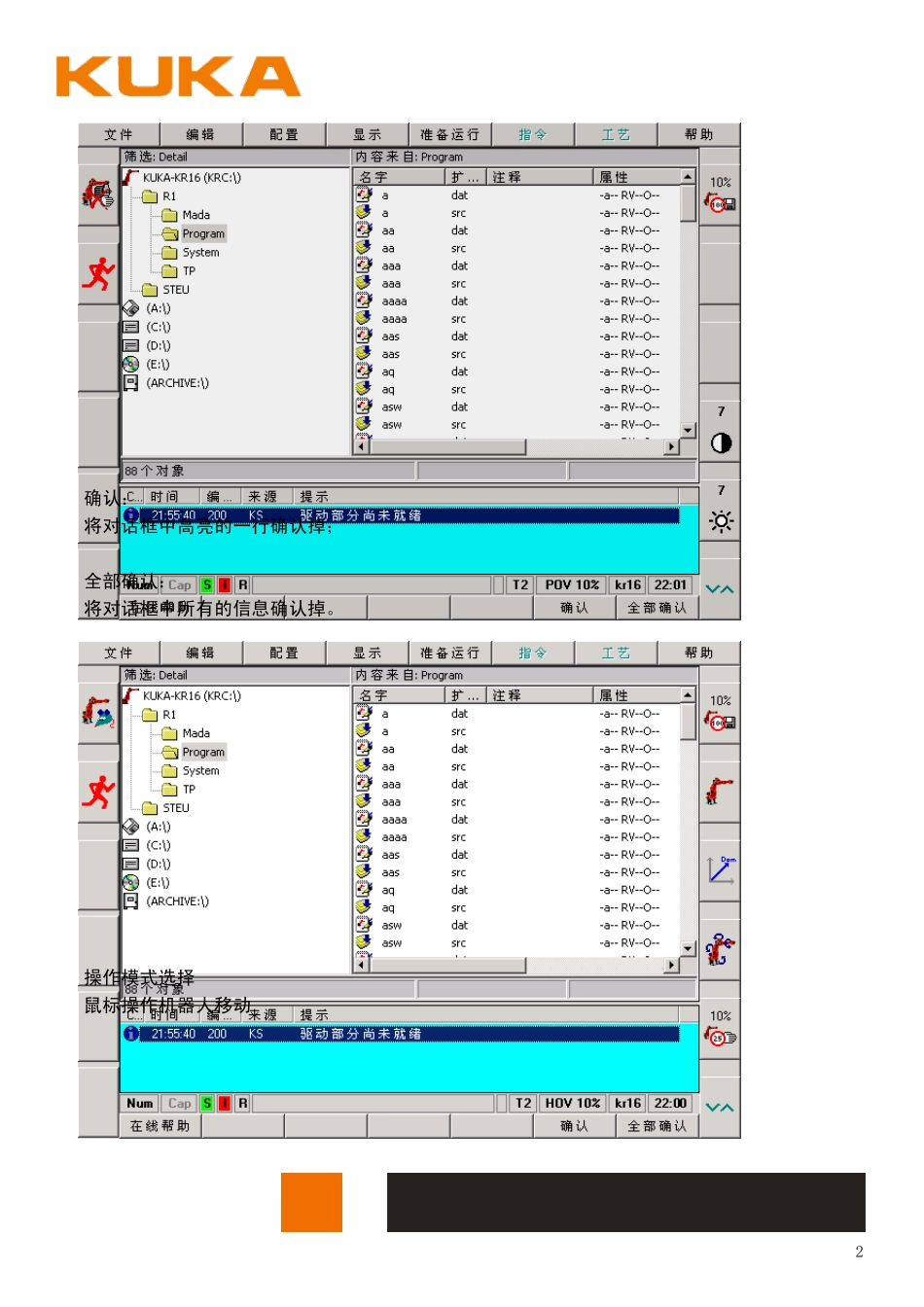
1 菜单栏 功能选择栏 命令栏 操作栏 路径栏 程序栏 对话框 状态栏 一、界面说明 2 确认: 将对话框中高亮的一行确认掉; 全部确认: 将对话框中所有的信息确认掉
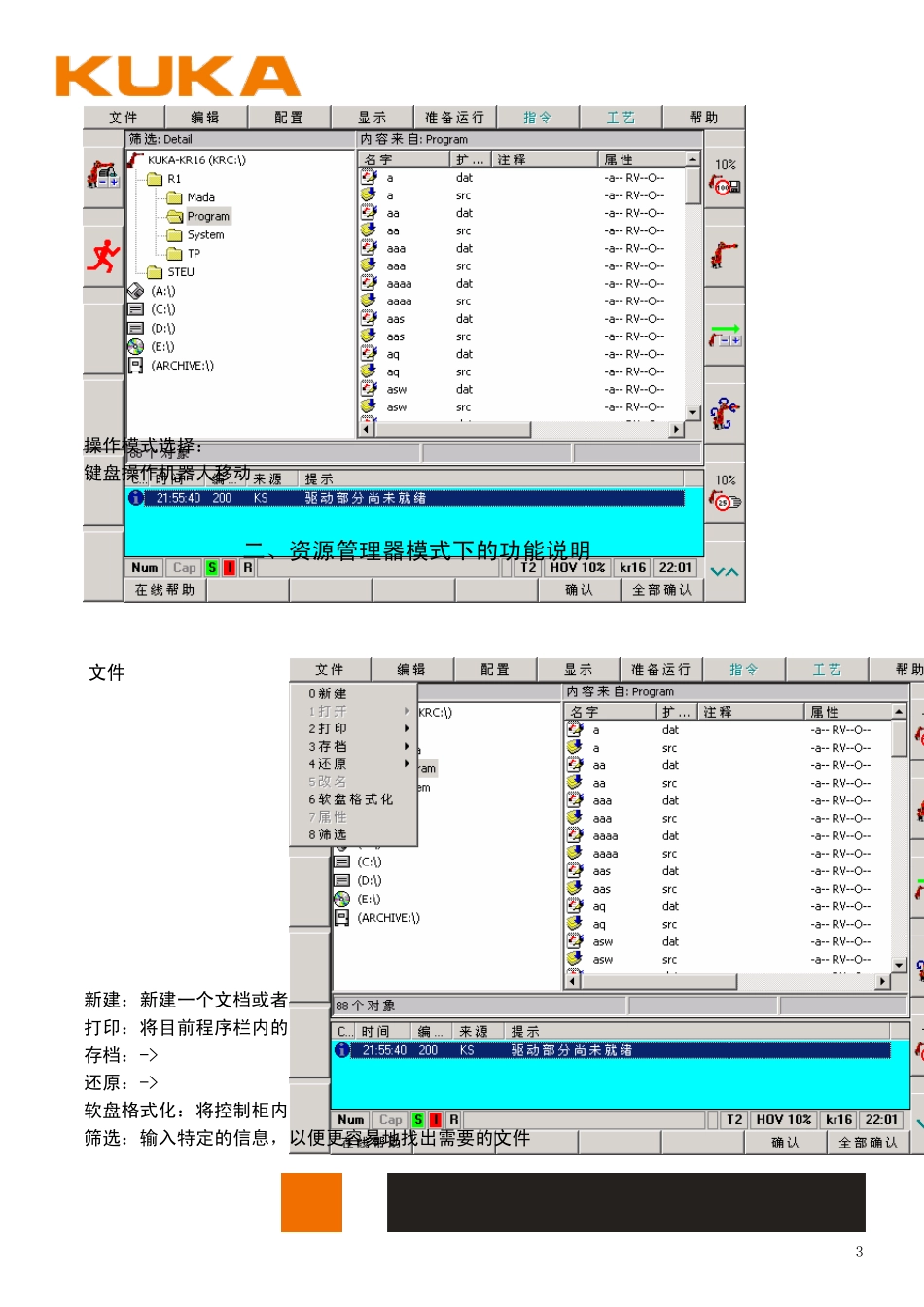
操作模式选择 鼠标操作机器人移动 3 操作模式选择: 键盘操作机器人移动 新建:新建一个文档或者文件夹 打印:将目前程序栏内的文件打印出来 存档:-> 还原:-> 软盘格式化:将控制柜内的软盘格式化 筛选:输入特定的信息,以便更容易地找出需要的文件 文件 二、资源管理器模式下的功能说明 4 全部:将所有信息存入软盘
注:如果程序过多,则有可能存档失败
此时需要单独将应用程 序存档,再将其它设置进行存档
应用程序:将程序栏内的所有程序存入软盘中 机器参数:将不同型号机器人的参数存入软盘中 配置:-> 登陆数据:将机器人操作时候的操作记录存入软盘中 输入/输出端配置:机器人和外围设备通讯接口配置 输入/输出长文本:机器人和外部设备通讯的基本通讯协议配置 库卡工艺包:为每个行业不同应用专门开发的工艺软件的配置 存档 配置 5 请参看存档,还原即将存档的资料重新拷贝回机器人 输入/输出端:-> 输入/输出端驱动程序-> 提交解释程序-> 状态键:如果有安装库卡工艺包,则功能选择栏会出现相应的功能键 手动移动-> 用户组:有三个对应选项:用户,仅可以进行基本操作;专家:可以使用高阶编程语句进行软 件编写;管理员:可以对系统配置进行更改
当前工具/基坐标:当前系统所用的工具类型或者基坐标类型
在正常情况下只有更换焊枪系 统以及外部轴系统需要用到此功能 工具定义:-> 开/关选项:-> 杂项:-> 还原 配置 6 外部自动:配置诸如撞枪保护开关等的端口信息
除特殊应用外一般不用作任何更改 输入/输出端 输入/输出驱动程序 驱动器复位:将所有输入输出端口的配置进行复位操作 输入/输出端重新配置:调出输入输出端口的配置文