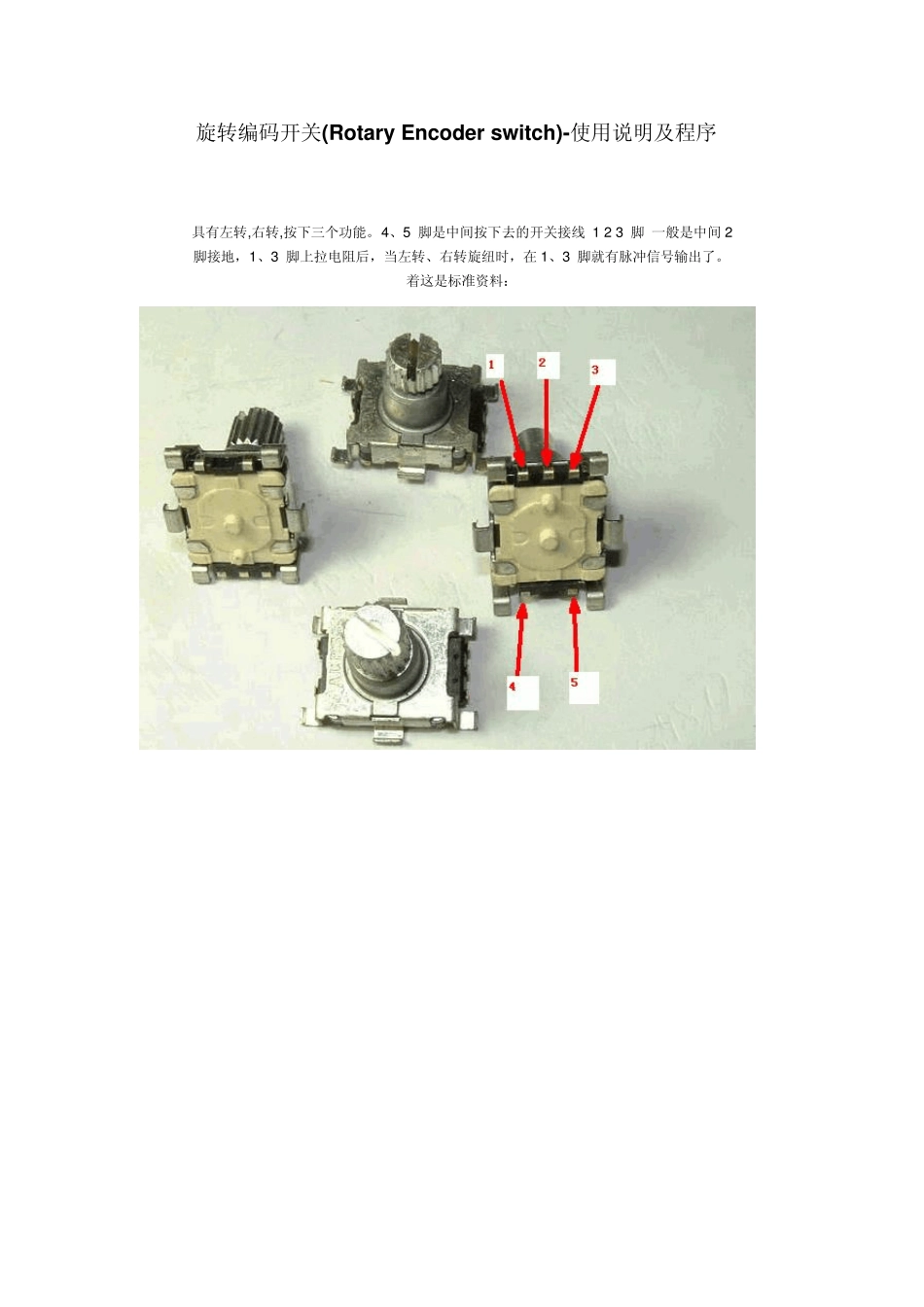
旋转编码开关(Rotary Encoder switch)-使用说明及程序 具有左转,右转,按下三个功能
4 、5 脚是中间按下去的开关接线 1 2 3 脚 一般是中间 2 脚接地,1 、3 脚上拉电阻后,当左转、右转旋纽时,在 1 、3 脚就有脉冲信号输出了
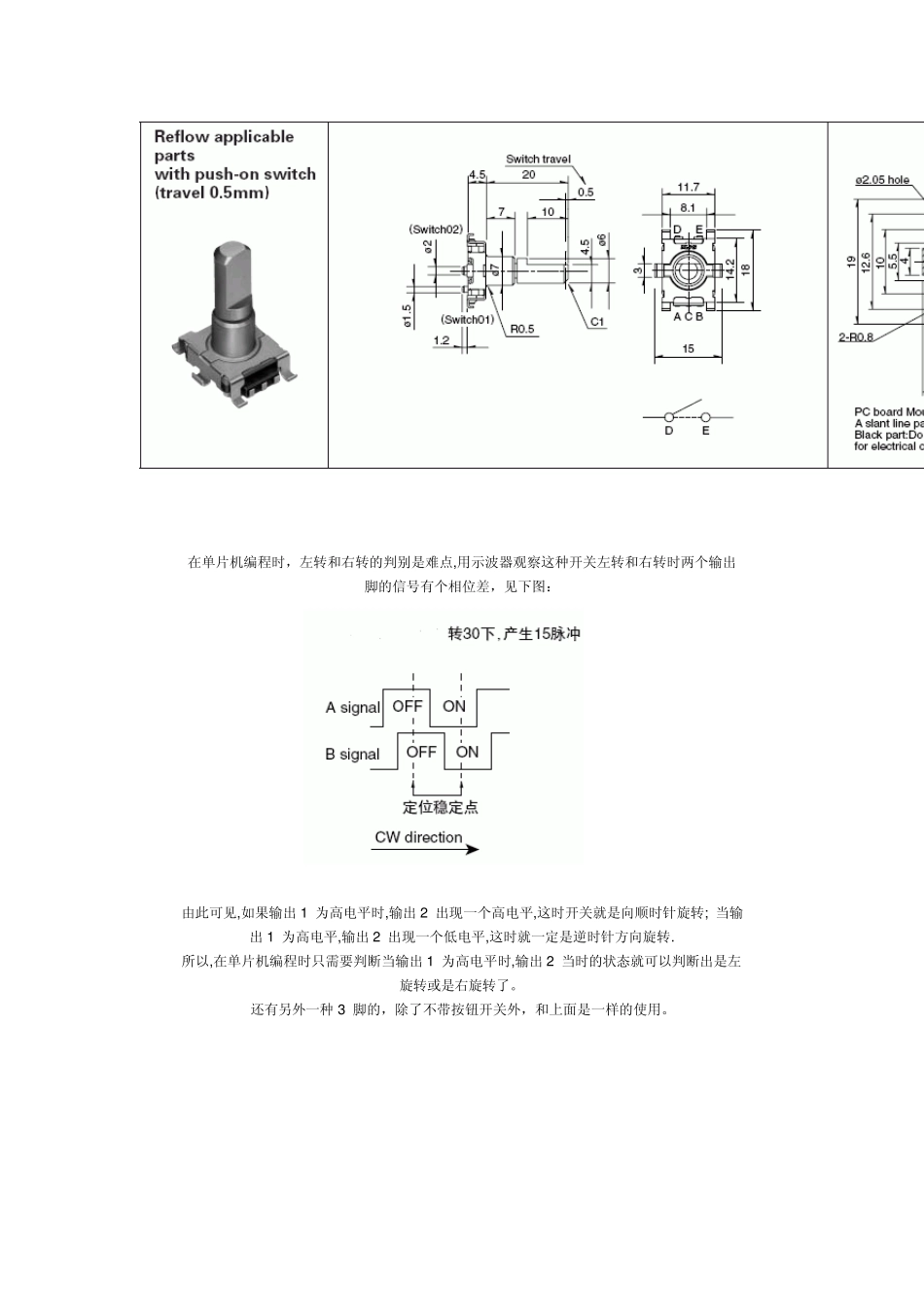
着这是标准资料: 在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出 脚的信号有个相位差,见下图: 由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输 出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转
所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时的状态就可以判断出是左 旋转或是右旋转了
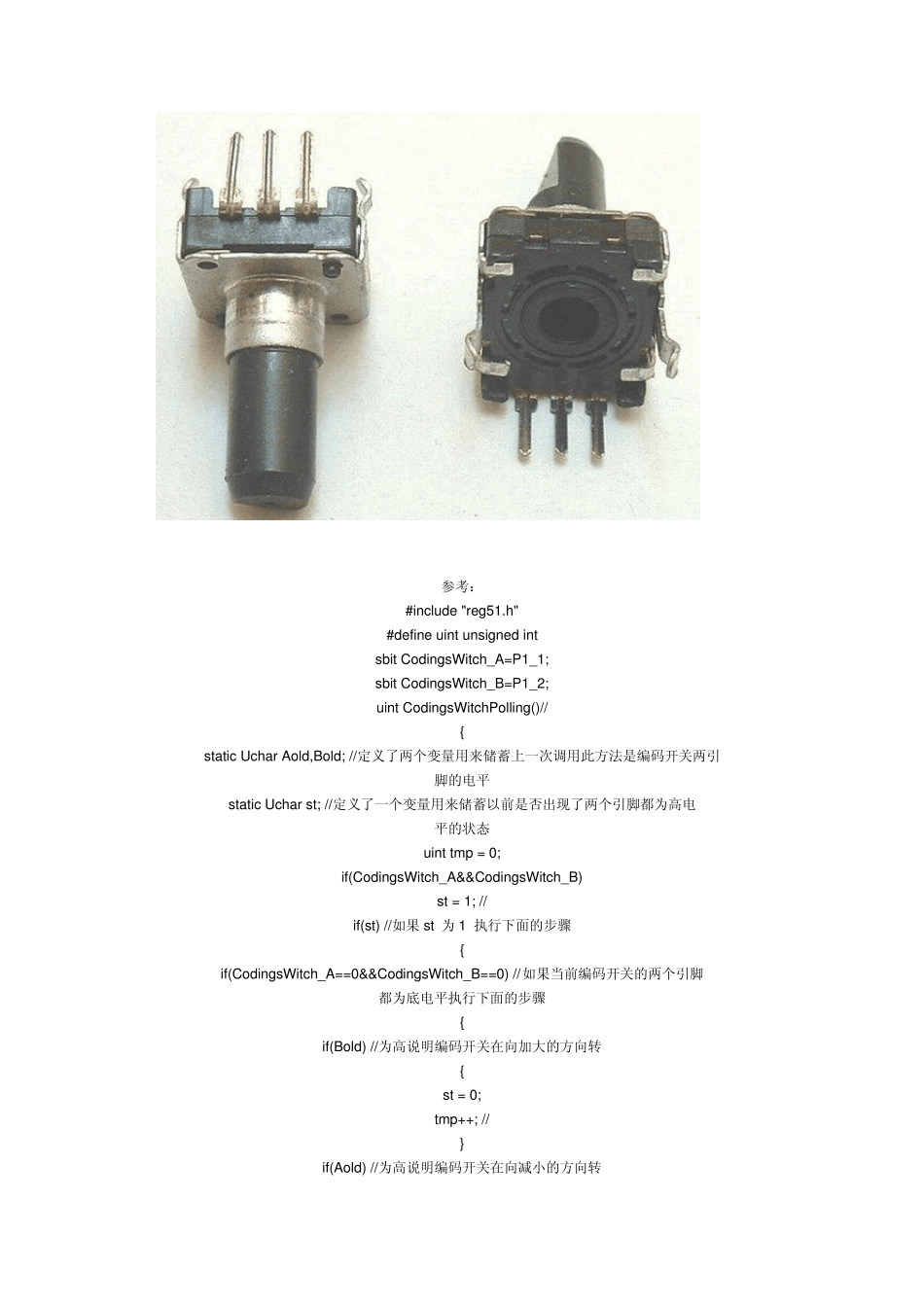
还有另外一种3 脚的,除了不带按钮开关外,和上面是一样的使用
参考: #include "reg51
h" #define uint unsigned int sbit CodingsWitch_A=P1_1; sbit CodingsWitch_B=P1_2; uint CodingsWitchPolling()// { static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引 脚的电平 static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电 平的状态 uint tmp = 0; if(CodingsWitch_A&&CodingsWitch_B) st = 1; // if(st) //如果 st 为 1 执行下面的步骤 { if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚 都为底电平执行下面的步骤 { if(Bold) //为高说明编码开关在向加大的方向转 { st =