一、前言 设计背景: 在科学探索和紧急抢险中经常会遇到对与一些危险或人类不能直接到达的地域的探测,这些就需要用机器人来完成
而在机器人在复杂地形中行进时自动避障是一项必不可少也是最基本的功能
因此,自动避障系统的研发就应运而生
我们的自动避障小车就是基于这一系统开发而成的
意义 随着科技的发展,对于未知空间和人类所不能直接到达的地域的探索逐步成为热门,这就使机器人的自动避障有了重大的意义
我们的自动避障小车就是自动避障机器人中的一类
自动避障小车可以作为地域探索机器人和紧急抢险机器人的运动系统,让机器人在行进中自动避过障碍物
成员情况 本组三位成员均为 2005 级基地班学生,都选修过数字电路课程
二、总体方案设计 1、设计要求 小车从无障碍地区启动前进,感应前进路线上的障碍物后,根据障碍物的位置选择下一步行进方向
并可通过两个独立按键对小车进行控速
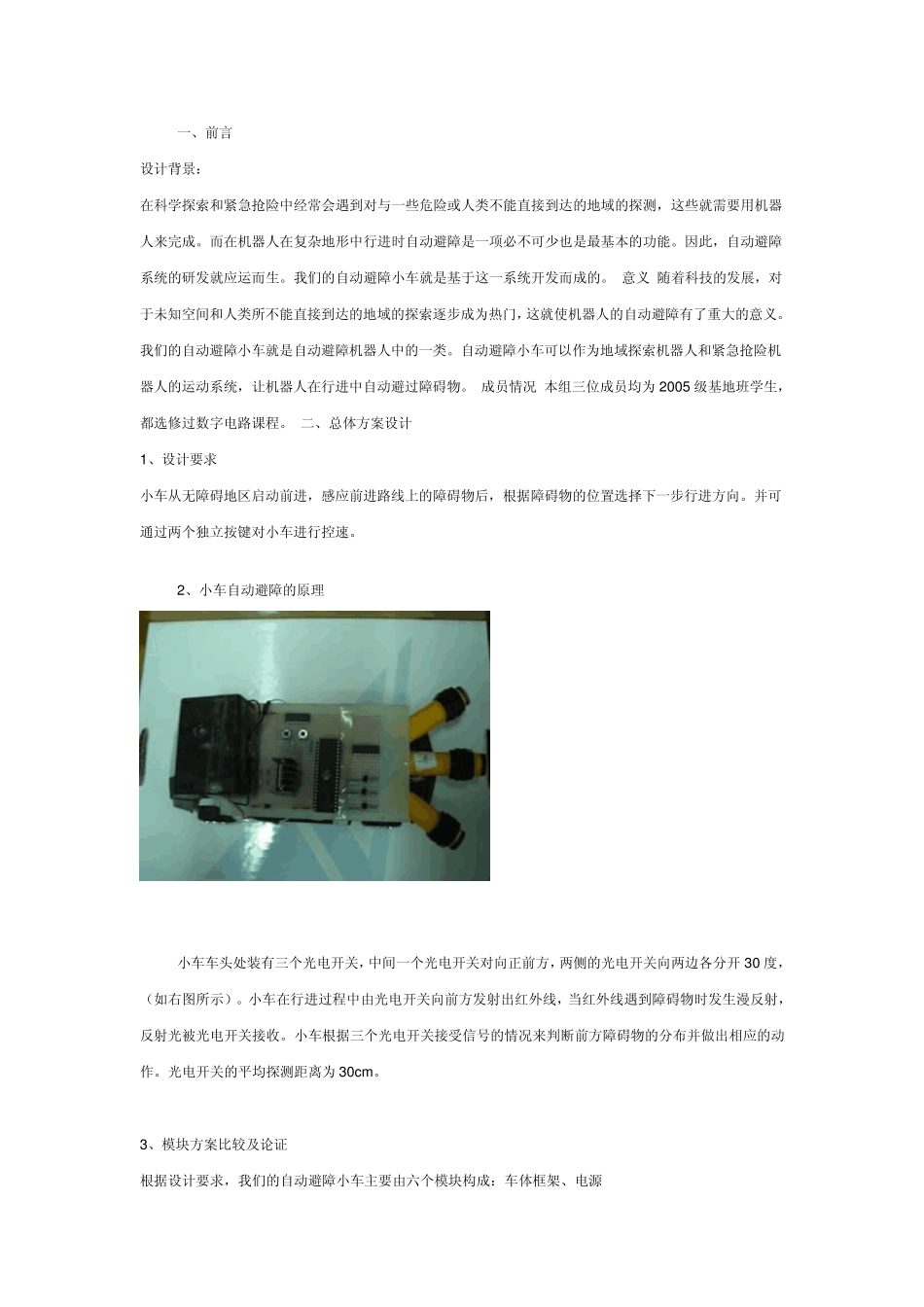
2、小车自动避障的原理 小车车头处装有三个光电开关,中间一个光电开关对向正前方,两侧的光电开关向两边各分开 30 度,(如右图所示)
小车在行进过程中由光电开关向前方发射出红外线,当红外线遇到障碍物时发生漫反射,反射光被光电开关接收
小车根据三个光电开关接受信号的情况来判断前方障碍物的分布并做出相应的动作
光电开关的平均探测距离为 30cm
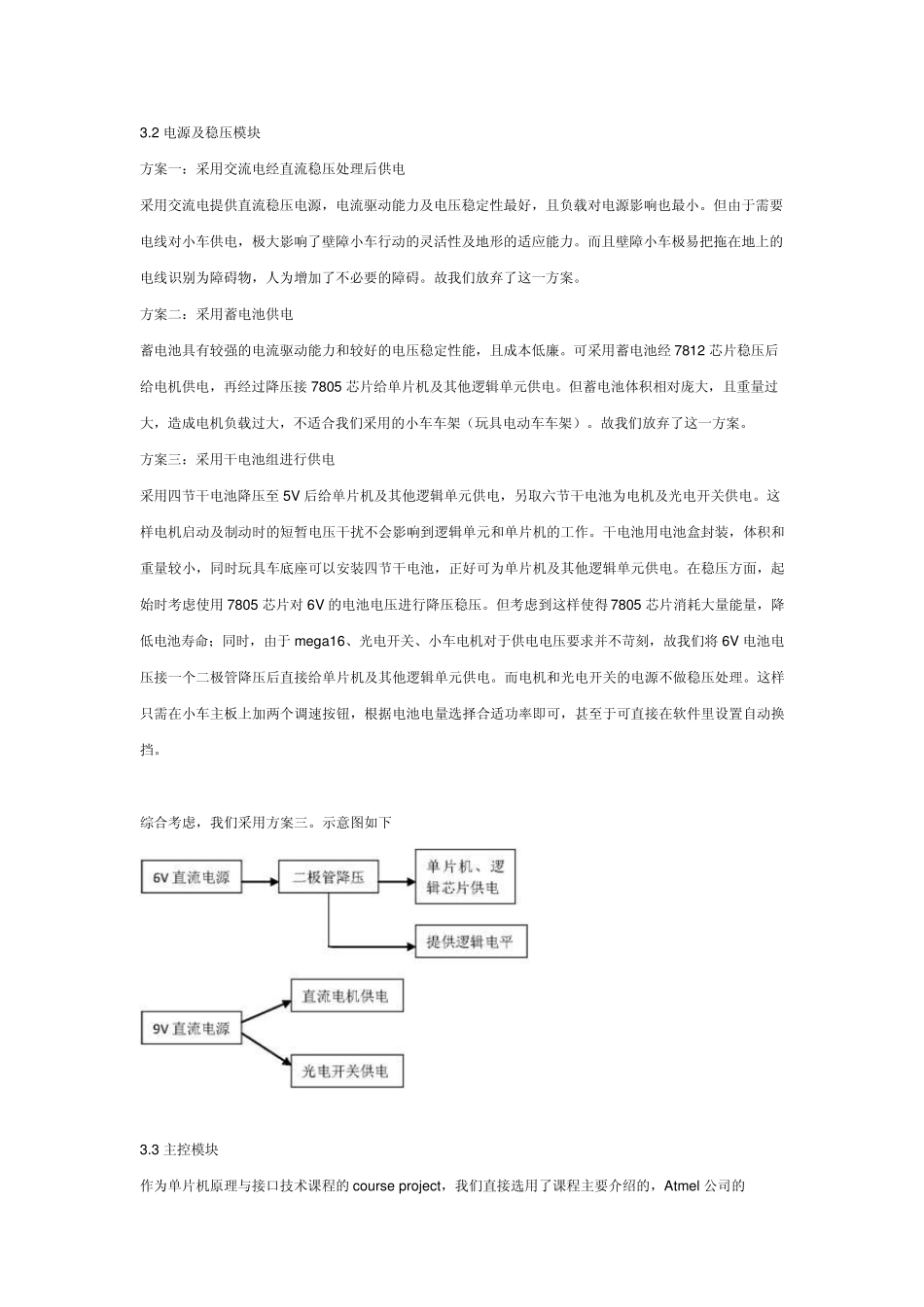
3、模块方案比较及论证 根据设计要求,我们的自动避障小车主要由六个模块构成:车体框架、电源 及稳压模块、主控模块、逻辑模块、探测模块、电机驱动模块组成
各模块分述如下: 3
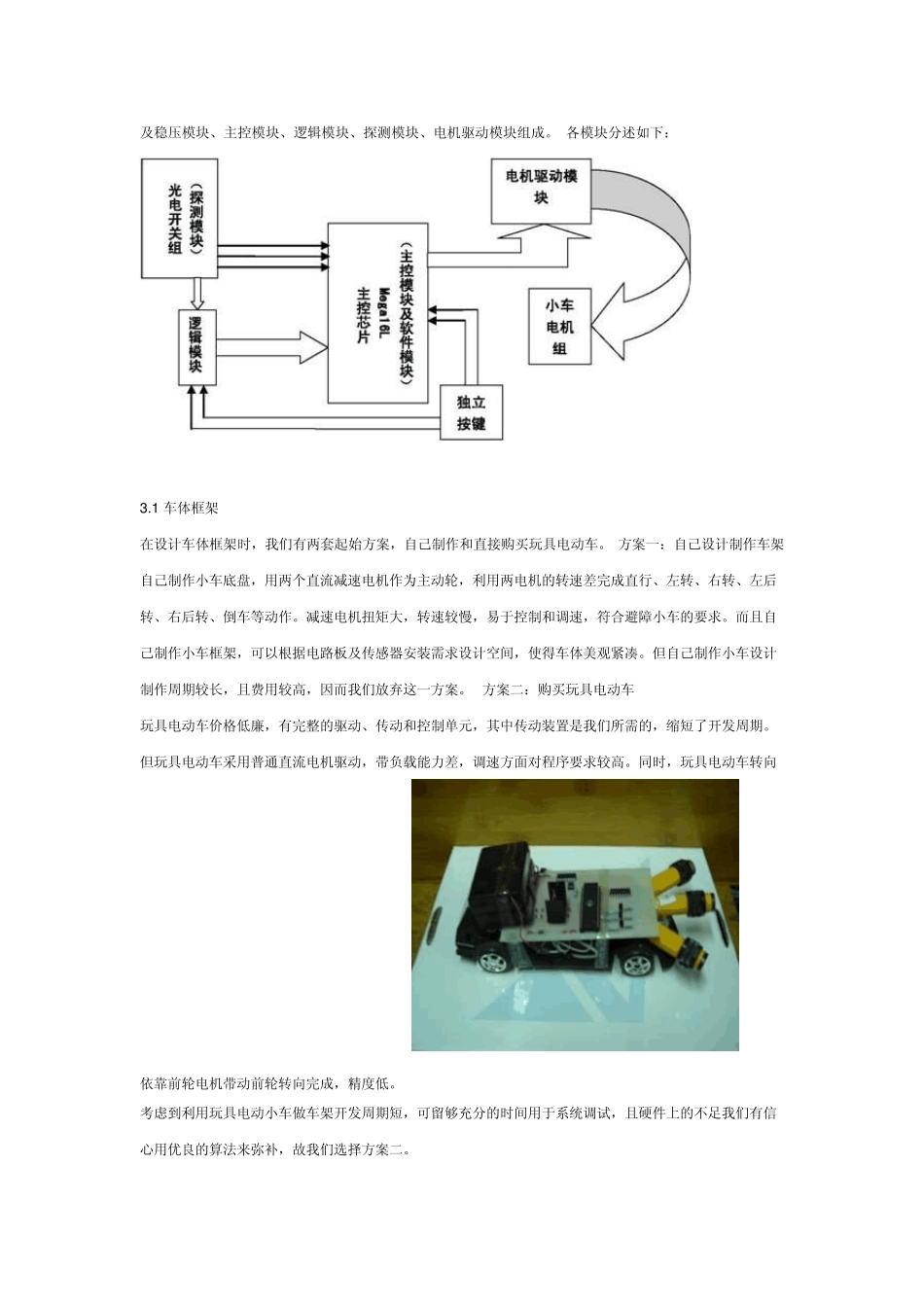
1 车体框架 在设计车体框架时,我们有两套起始方案,自己制作和直接购买玩具电动车
方案一:自己设计制作车架 自己制作小车底盘,用两个直流减速电机作为主动轮,利用两电机的转速差完成直行、左转、右转、左后转、右后转、倒车等动作
减速电机扭矩大,转速较慢,易于控制和调速,符合避障小车的要求
而且自己制作小车