智能小车设计报告 1 硬件设计与分析: 根据题目要求,对车的控制分为以下几个阶段:按键启动,声控启动,车体可以自动寻迹和红外避障
任务是声敏传感器接收到声音信号或按下启动按键,启动小车后,检测地面引导黑线,控制车体沿设计好的路线向前运动
当进入挡板区,小车向一个方向运行到前挡板位置停止,然后向反方向运行至后挡板位置,如此重复
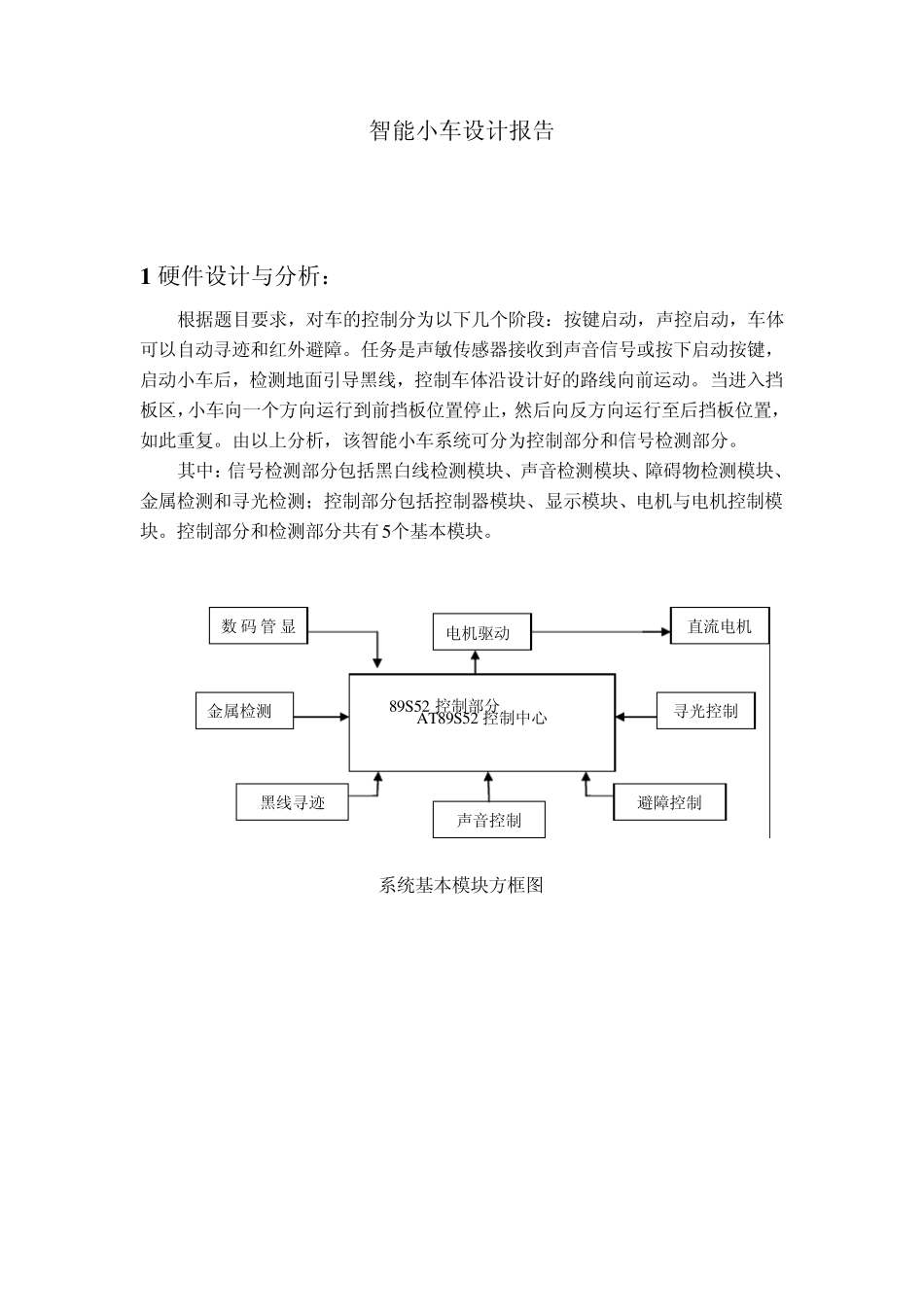
由以上分析,该智能小车系统可分为控制部分和信号检测部分
其中:信号检测部分包括黑白线检测模块、声音检测模块、障碍物检测模块、金属检测和寻光检测;控制部分包括控制器模块、显示模块、电机与电机控制模块
控制部分和检测部分共有5个基本模块
系统基本模块方框图 89S52 控制部分 电机驱动 黑线寻迹 AT89S52 控制中心 避障控制 直流电机声音控制 寻光控制 金属检测 数 码 管 显 1
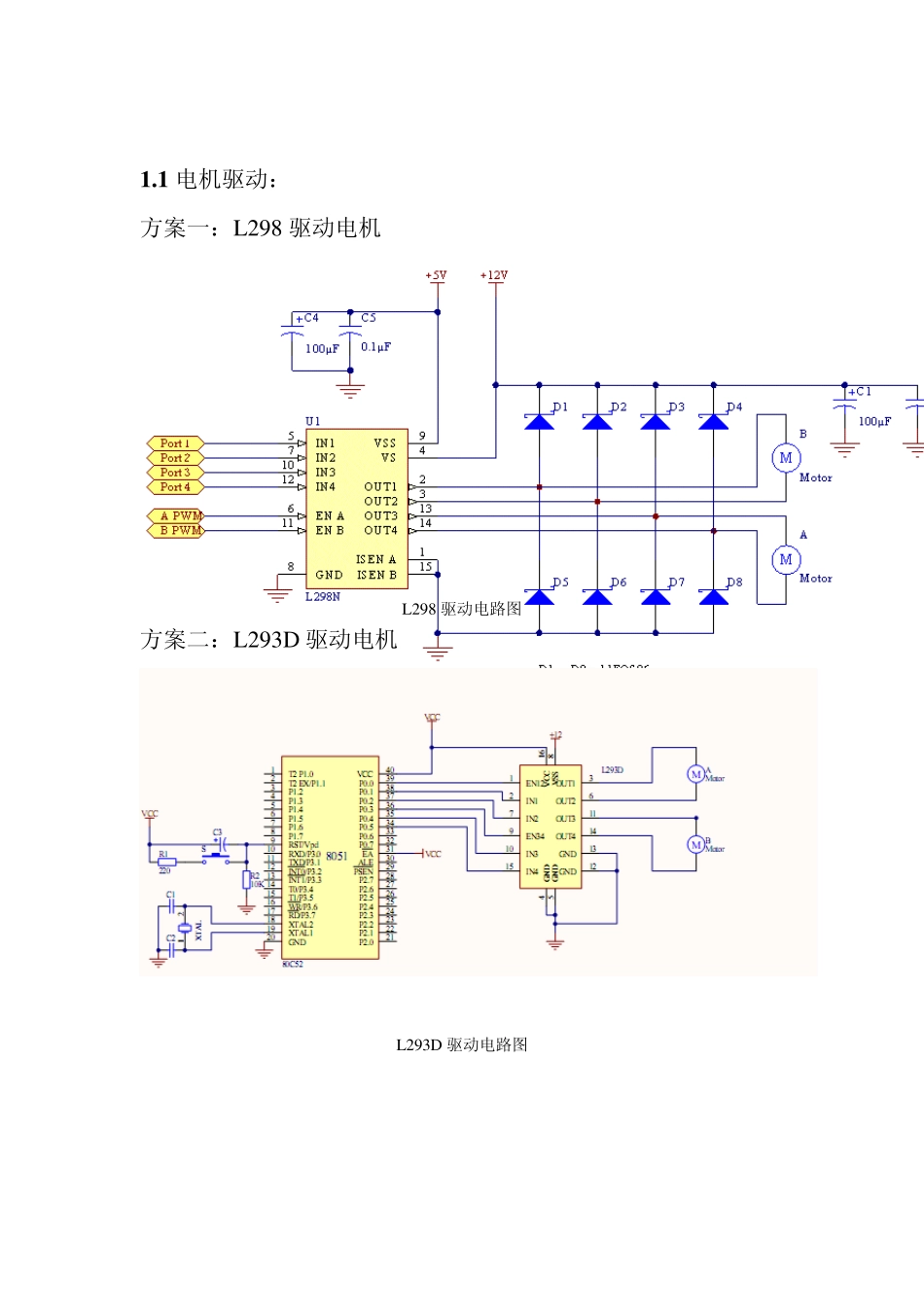
1 电机驱动: 方案一:L298 驱动电机 L298 驱动电路图 方案二:L293D 驱动电机 L293D 驱动电路图 1
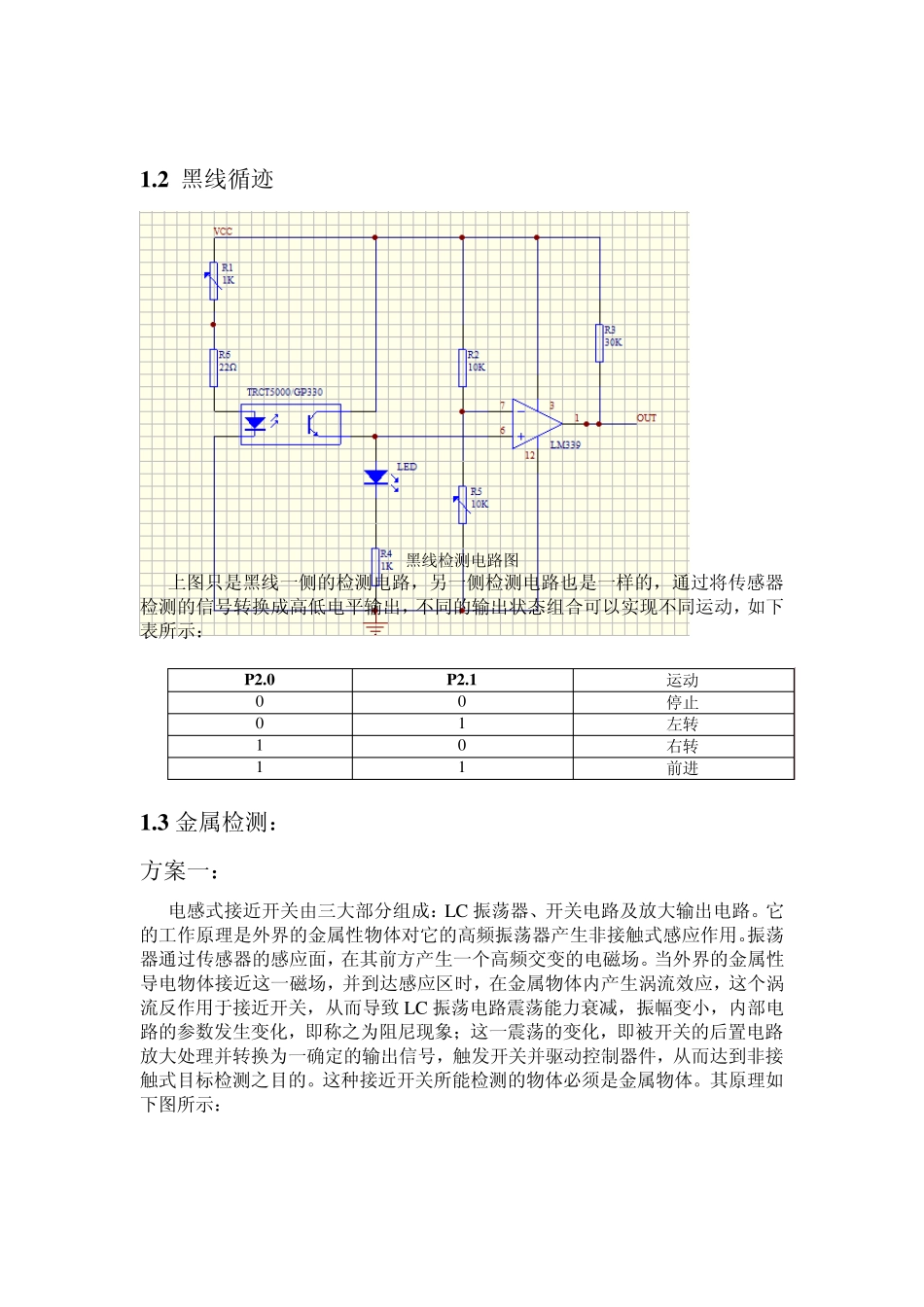
2 黑线循迹 黑线检测电路图 上图只是黑线一侧的检测电路,另一侧检测电路也是一样的,通过将传感器检测的信号转换成高低电平输出,不同的输出状态组合可以实现不同运动,如下表所示: P2
1 运动 0 0 停止 0 1 左转 1 0 右转 1 1 前进 1
3 金属检测: 方案一: 电感式接近开关由三大部分组成:LC 振荡器、开关电路及放大输出电路
它的工作原理是外界的金属性物体对它的高频振荡器产生非接触式感应作用
振荡器通过传感器的感应面,在其前方产生一个高频交变的电磁场
当外界的金属性导电物体接近这一磁场,并到达感应区时,在金属物体内产生涡流效应,这个涡流反作用于接近开关,从而导致 LC 振荡电路震荡能力衰减,振幅变小,内部电路的参数发生变化,即称之为阻尼现象;这一震荡的变化,即被开关的后置电路放大处理并转换为一确定的输出信号,触发开