1 西北工业大学勇毅队技术报告 第三章 智能车硬件设计 3
1 视频分离模块--LM 1881 检测赛道相对车模的偏移量方向,曲率等信息是实现车模自主沿赛道运行基础,获取更多,更远,更精确的赛道信息是提高车速的关键
道路检测方式有多种,总体可以分为两大类:红外检测方式和CCD/CMOS摄像头检测方式
本设计采用第二种方式
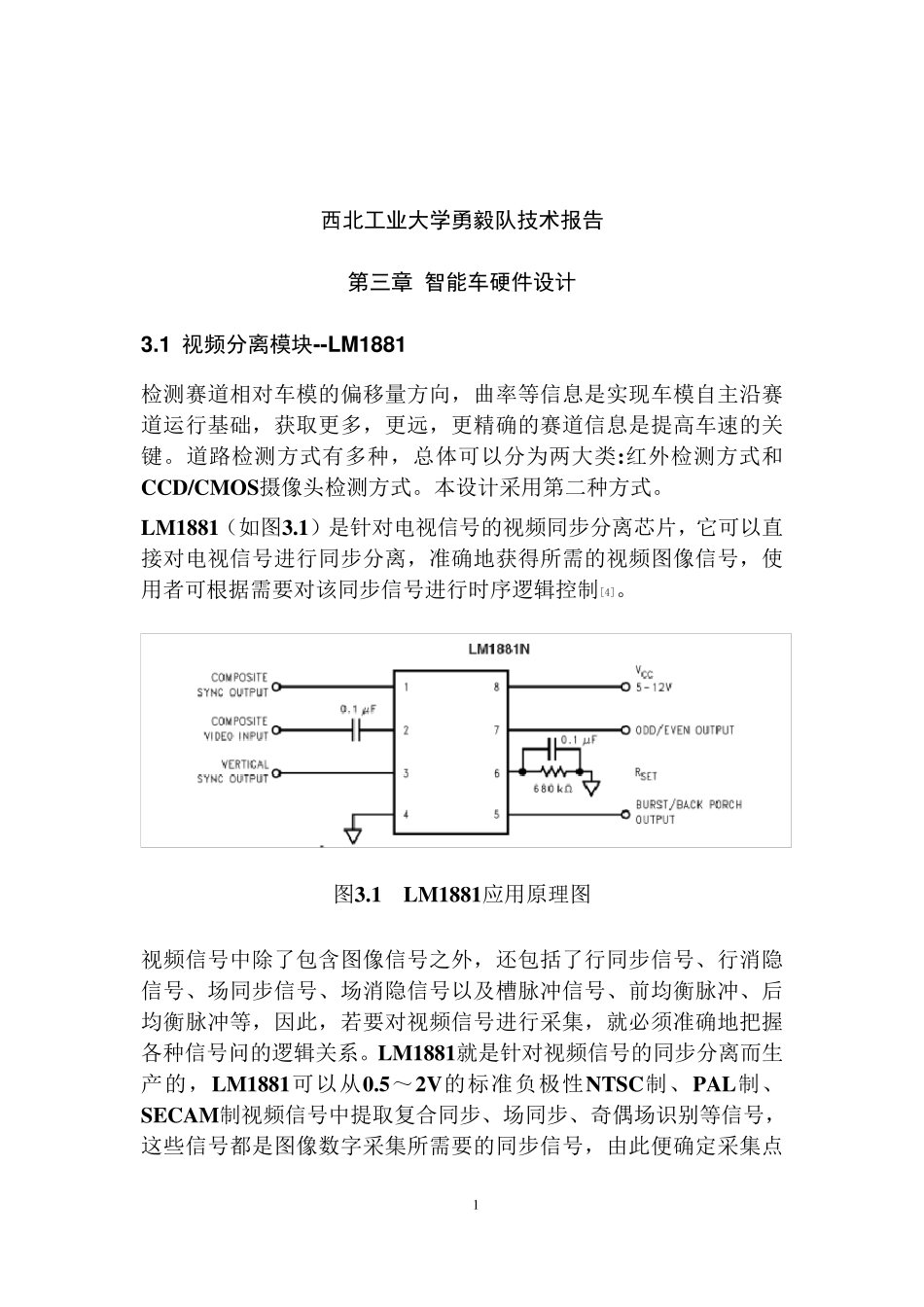
LM1881(如图3
1)是针对电视信号的视频同步分离芯片,它可以直接对电视信号进行同步分离,准确地获得所需的视频图像信号,使用者可根据需要对该同步信号进行时序逻辑控制[4]
1 LM1881应用原理图 视频信号中除了包含图像信号之外,还包括了行同步信号、行消隐信号、场同步信号、场消隐信号以及槽脉冲信号、前均衡脉冲、后均衡脉冲等,因此,若要对视频信号进行采集,就必须准确地把握各种信号问的逻辑关系
LM1881就是针对视频信号的同步分离而生产的,LM1881可以从0
5~2V的标准负极性NTSC制、PAL制、SECAM制视频信号中提取复合同步、场同步、奇偶场识别等信号,这些信号都是图像数字采集所需要的同步信号,由此便确定采集点 在哪一场,哪一行
复合同步输出(COMPOSITE SYNC OUTPUT) 复合同步输出是对复合视频输人信号的箝位输出
LM1881芯片将视频信号同步顶箝位到直流1
5V,将比较器的阈值设在1
5V左右,这样便可使视频信号的图像波形部分被拉平,其他信号波形按原样复现
箝位线设在同步脉冲上,典型值为1
57mV左右
5V输人来说,箝位线大约为同步脉冲幅值的50%;而对于2V输人,箝位线大约为同步脉冲幅值的11%
奇偶场脉冲输出(ODD/EVEN OUTPUT) 视频图像信号一帧画面分2场扫描,第1场先扫描奇数行1、3、5、⋯ ,称为奇数场;第2场扫描画面上的偶数行2、4、6、⋯,称为偶数场
奇数场开始的前