开篇本文以Beckhoff公司PLC通过CANOpen协议控制路斯特ServerC plus驱动器驱动phase伺服电机系统为实验背景给出的
下文控制字为 PLC 扫描上来的驱动器(BOXx,其中 x代表站号)的 RxPDO1 中的变量 1(Var-0),状态字为 PLC 扫描上来的驱动器(BOXx)的TxPDO1中的变量(1 Var-0)
控制字和状态字均为16 字节
详情请参照文档“EK1100+EL6751连路斯特 ServerC plus 驱动路斯特 400w 电机”
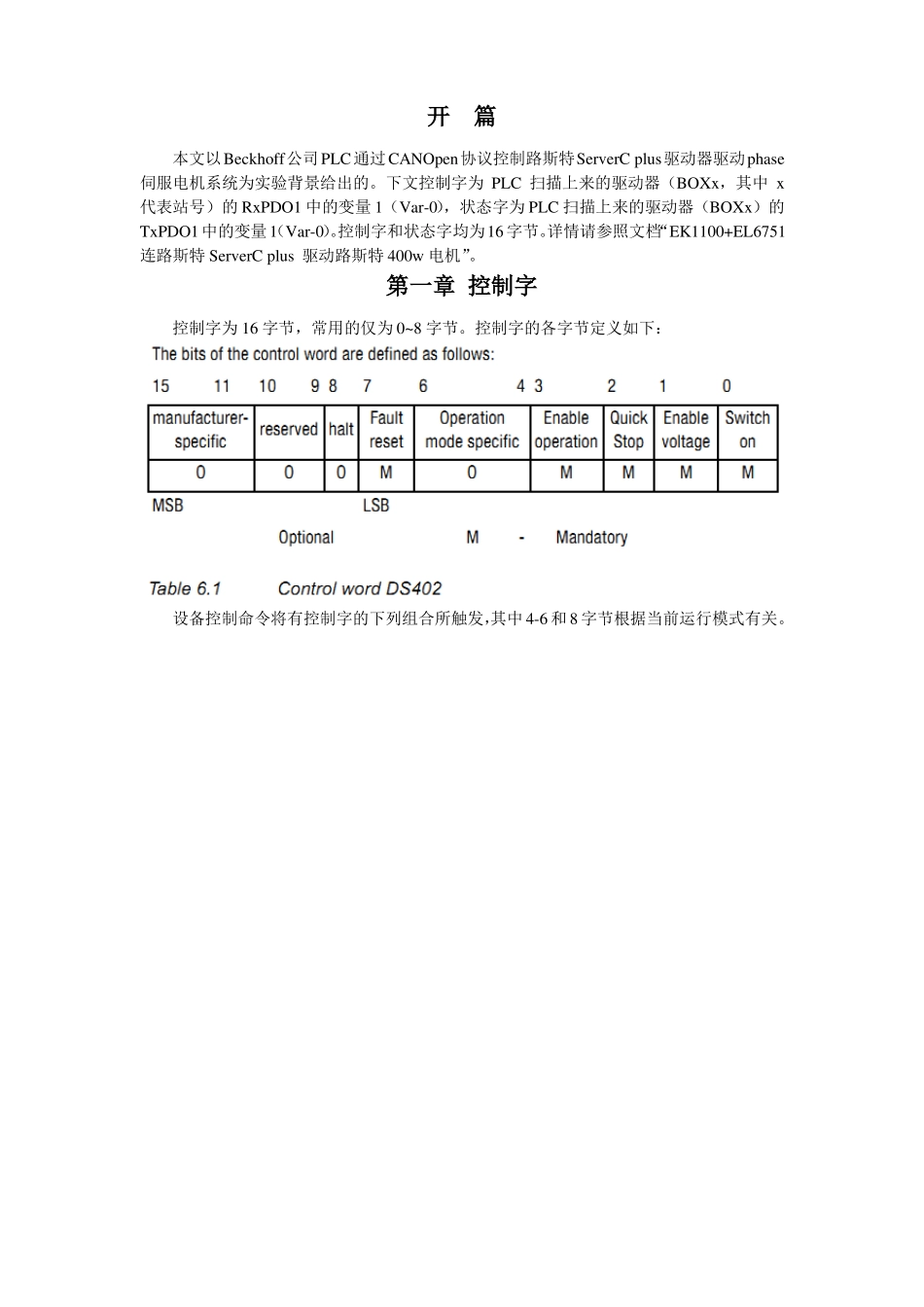
第一章 控制字控制字为 16 字节,常用的仅为 0~8 字节
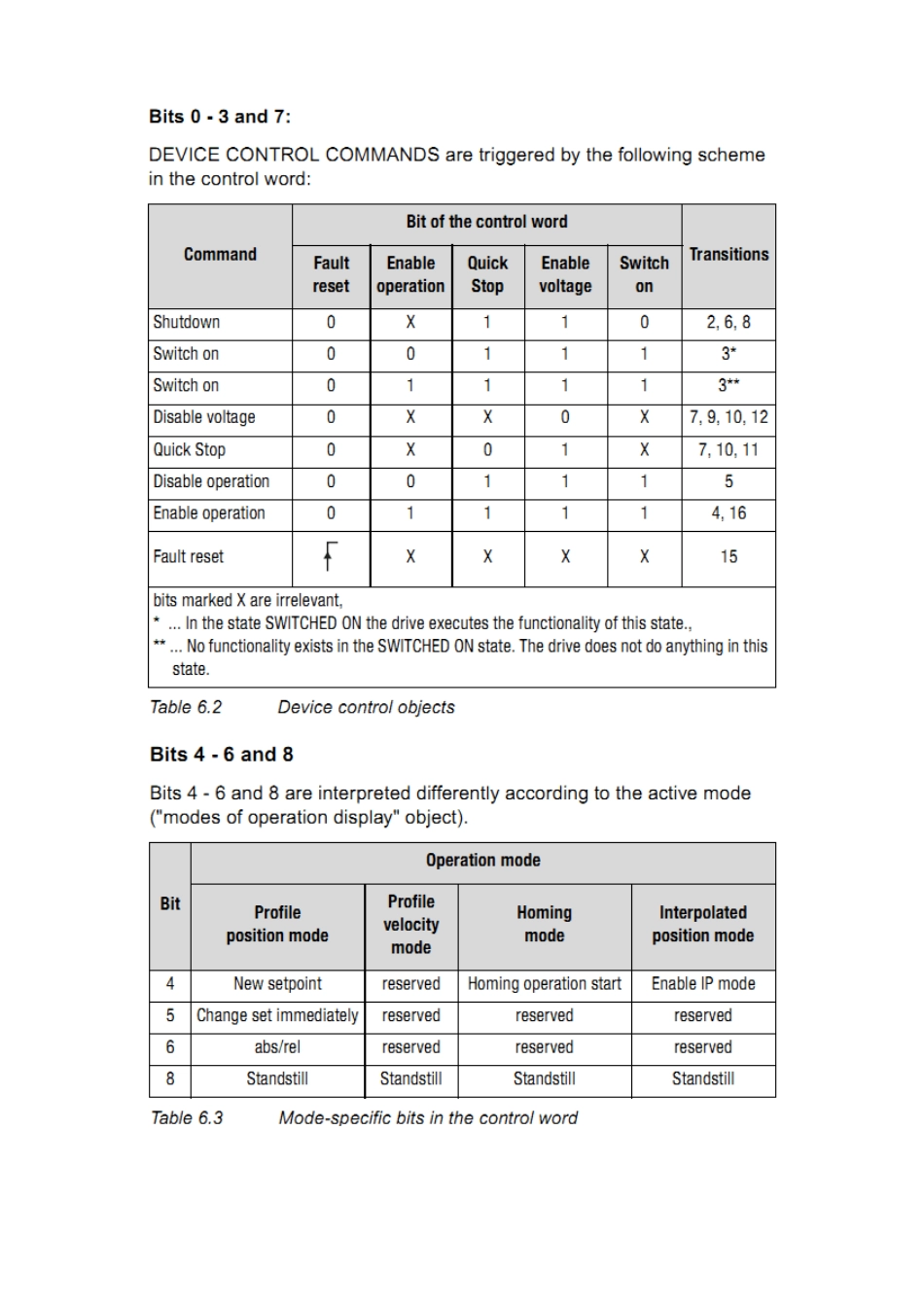
控制字的各字节定义如下:设备控制命令将有控制字的下列组合所触发,其中 4-6 和 8 字节根据当前运行模式有关
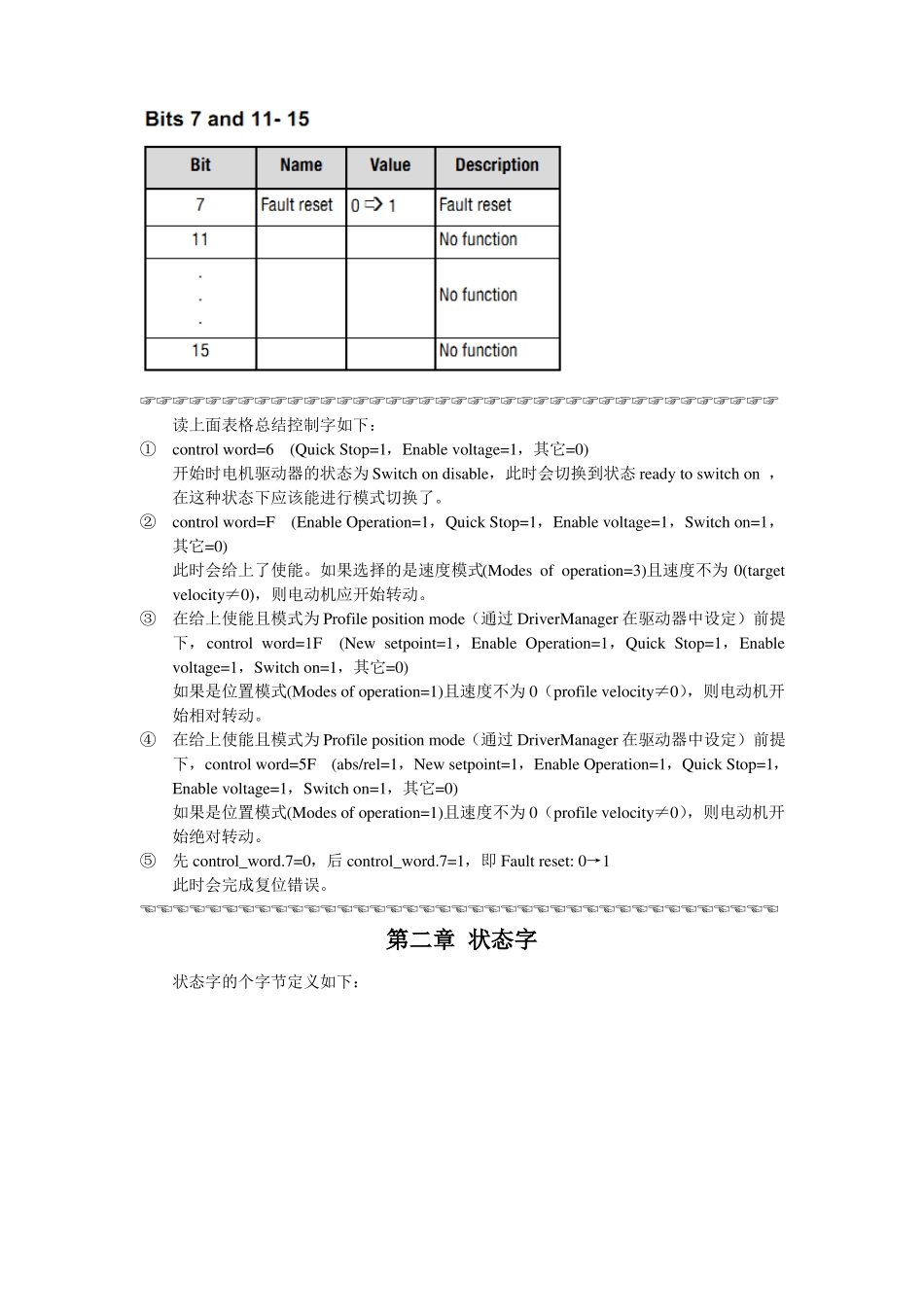
☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞☞读上面表格总结控制字如下:①control word=6(Quick Stop=1,Enable voltage=1,其它=0)开始时电机驱动器的状态为 Switch on disable,此时会切换到状态 ready to switch on ,在这种状态下应该能进行模式切换了
②control word=F(Enable Operation=1,Quick Stop=1,Enable voltage=1,Switch on=1,其它=0)此时会给上了使能
如果选择的是速度模式(Modes of operation=3)且速度不为 0(targetvelocity≠0),则电动机应开始转动
③在给上使能且模式为 Profile position mode(通过 DriverManager 在驱动器中设定)前提下,control word=1F(New setpoint=1,Enable Operation=1,Quick Stop=1,Enablevo