东南大学自动化学院 实 验 报 告 课程名称: 自动控制基础 实验名称: 状态观测器的设计 院 (系): 自动化学院 专 业: 自动化 姓 名: 吴静 学 号: ******** 实 验 室: 机械动力楼 4 1 7 室 实验组别: 同组人员: 实验时间:2 0 1 1 年 0 5 月 1 3 日 评定成绩: 审阅教师: 2 一、实验目的 1
理解观测器在自动控制设计中的作用 2
理解观测器的极点设置 3
会设计实用的状态观测器 二、实验原理 如果控制系统采用极点配置的方法来设计,就必须要得到系统的各个状态,然后才能用状态反馈进行极点配置
然而,大多数被控系统的实际状态是不能直接得到的,尽管系统是可以控制的
如果能搭试一种装置将原系统的各个状态较准确地取出来,就可以实现系统极点任意配置
于是提出了利用被控系统的输入量和输出量重构原系统的状态,并用反馈来消除原系统和重构系统状态的误差,这样原系统的状态就能被等价取出,从而进行状态反馈,达到极点配置改善系统的目的,这个重构的系统就叫状态观测器
另外,状态观测器可以用来监测被控系统的各个参量
观测器的设计线路不是唯一的,本实验采用较实用的设计
给一个被控二阶系统,其开环传递函数是 G(s)=12(1)(1)KT sT s ,12 KK K观测器如图示
设被控系统状态方程 X=AX+BuY=CX 构造开环观测器,X Y 为状态向量和输出向量估值 XA X +BuYXC• 由于初态不同,估值X 状态不能替代被控系统状态 X ,为了使两者初态跟随,采用输出误差反馈调节,加入反馈量 H(Y-Y) ,即构造闭环观测器,闭环观测器对重构造的参数误差也有收敛作用
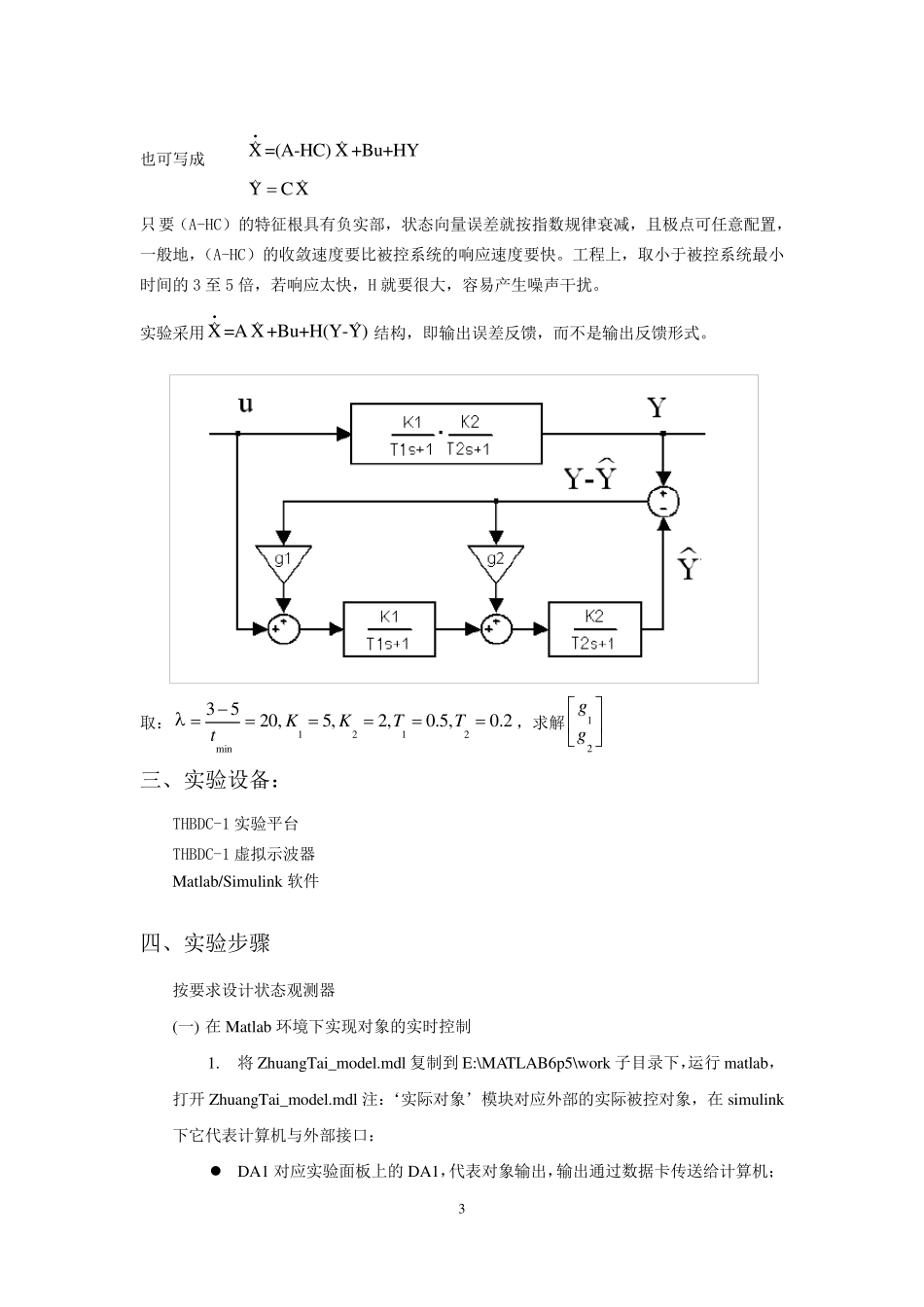
X =A X +Bu+H(Y-Y)YCX• 3 也 可 写 成 X =(A-HC) X +Bu+HYYCX• 只