24/10/24FAW-VWKUKARoboterKUKA机器人基础KUKAproductsKUKAproducts24/10/24FAW-VWKUKARoboter一
KUKARoboter系统概述1
1机器人在现场的应用焊接点焊MIG焊TOX焊螺柱焊激光焊24/10/24FAW-VWKUKARoboter一
KUKARoboter系统概述1
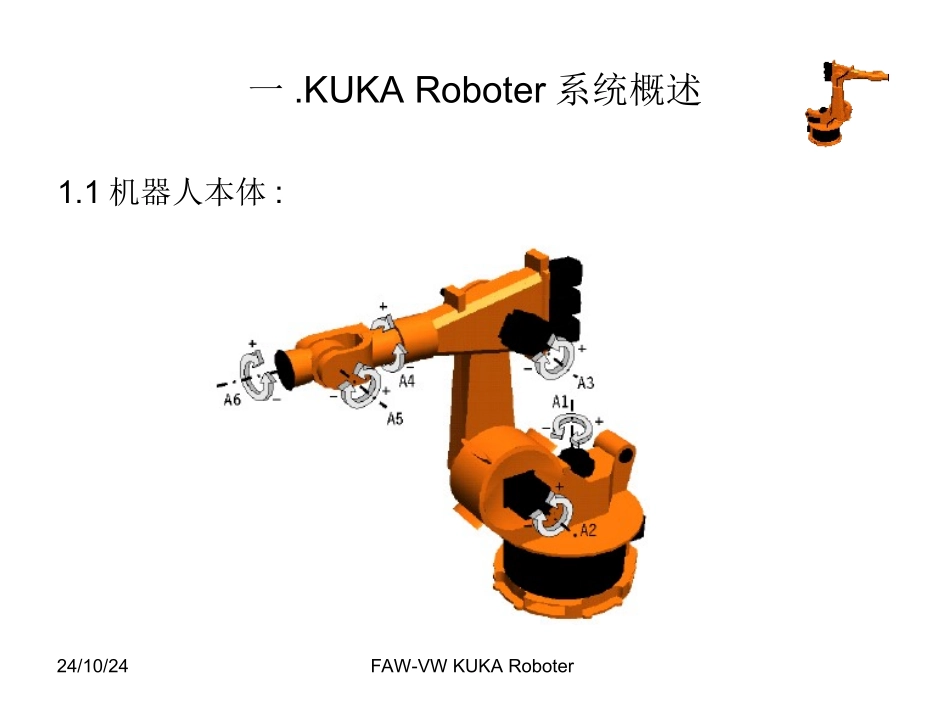
1机器人本体:24/10/24FAW-VWKUKARoboter一
KUKARoboter系统概述1
2机器人驱动方案24/10/24FAW-VWKUKARoboter一
KUKARoboter系统概述1
2机器人驱动方案奔腾处理器:驱动模块:24/10/24FAW-VWKUKARoboterS1接口功能•SAE承载业务管理功能,例如建立和释放•UE在LTE_ACTIVE状态下的移动性功能,例如Intra-LTE切换和Inter-3GPP-RAT切换
•S1寻呼功能•NAS信令传输功能•S1接口管理功能,例如错误指示等•网络共享功能•漫游和区域限制支持功能•NAS节点选择功能•初始上下文建立功能LTE系统24/10/24FAW-VWKUKARoboterS1接口的信令过程•S1接口的信令过程有:–SAE承载信令过程,包括SAE承载建立和释放过程
–切换信令过程–寻呼过程–NAS传输过程,包括上行方向的初始UE和下行链路的直传–错误指示过程–初始上下文建立过程LTE系统24/10/24FAW-VWKUKARoboter一
KUKARoboter系统概述1
2机器人驱动方案KUKA-VGA卡(显示卡):MFC卡(多功能卡):DSE卡(数字式伺服电子电路):DSEMFCVGA24/10/24FAW-VWKUKARoboter一
KUKARoboter系统概述1
2机器人驱动方案旋转变压器数字转换器(RDW):KUKA控制屏(KCP):它是