iU=UT+Ri+dMSdt(15
1=L(°)15 开关磁阻电机本章我们将简化 RMxprt—些基本操作的介绍,以便介绍一些更高级的使用
有关 RMxprt 基本操作的详细介绍请参考第一部分的章节
15・1 基本理论开关磁阻电机的定子和转子均为凸极结构,通常定子的极对数大于转子的极对数
定子磁极上有多相集中绕组,转子上无绕组
当定子上某(些)绕组通电时,由于磁阻的差异,转子将受到力矩的作用,转子磁极向与定子磁极对齐(磁阻最小)的位置转动,以使定子绕组获得最大的磁链
绕组的相数是定子极数与定、转子极数的最小公约数之比
在开关磁阻电动机(SRM)中,定子和转子的极数不同,转子上设有位置传感器,定子电流严格地根据转子的位置换向
转子的位置信号通过位置传感器获得
定子绕组按顺序触发,一般情况下当一相绕组电流关断或快要关断时,下一相绕组被触发
因此可以忽略两相绕组间的相互影响
一相的电压方程为:式中“丁表示晶体管或二极管的压降,RS表示定子绕组电阻
屮®i)表示转子在创立置,绕组电流为 i 时绕组的磁链,如图 15
1 所示,当转子槽的中心与绕组轴线对齐时转子的位置为 0
1 屮(0,i)令(15
2)u=:30L,0=Wt
3)u=uT+RJ+L0pi+叫式中少表示转速,用电角度表示,微分算子为:edp=dt瞬时电磁转矩 t2为:t=-Gi222输入电功率可由电压和电流获得:(15
6)P-=Tfuid(15
7)P=P1-(PW+Pua+Pt+PFe)(15
9)得出输出的机械功率为:式中 Pf,PC,Pt和 PF分别表示摩擦和风损耗、电枢铜损耗、晶体管/二极管压降损耗和铁心损fwCuatFe耗
平均输出的机械转矩为T=-^2-2①m式中少表示转速,用电角度表示电机的效率由下式计算:m(15
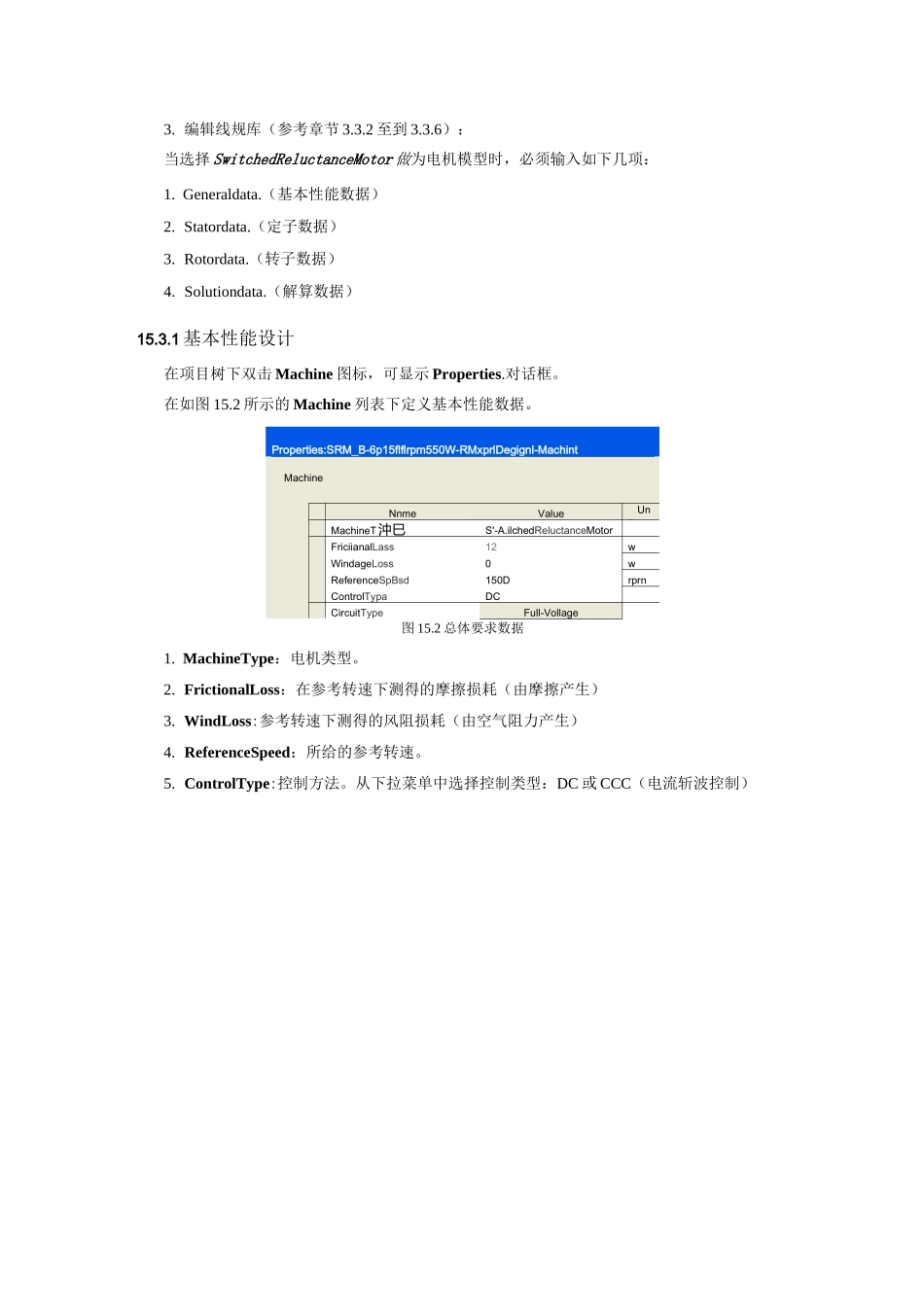
2 主要特点15