外轴参数调整 一、 ABB 机器人对外轴的控制参数的调整的基本步骤 完成外轴的硬件安装,如电机的安装,SMB 盒的安装等; 向机器人控制器内加载外轴的临时参数文件; 对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动; 如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置; 等所有的参数设置都完成后开始电机参数的调整
二、 配置外轴参数 2
1 加载参数 2
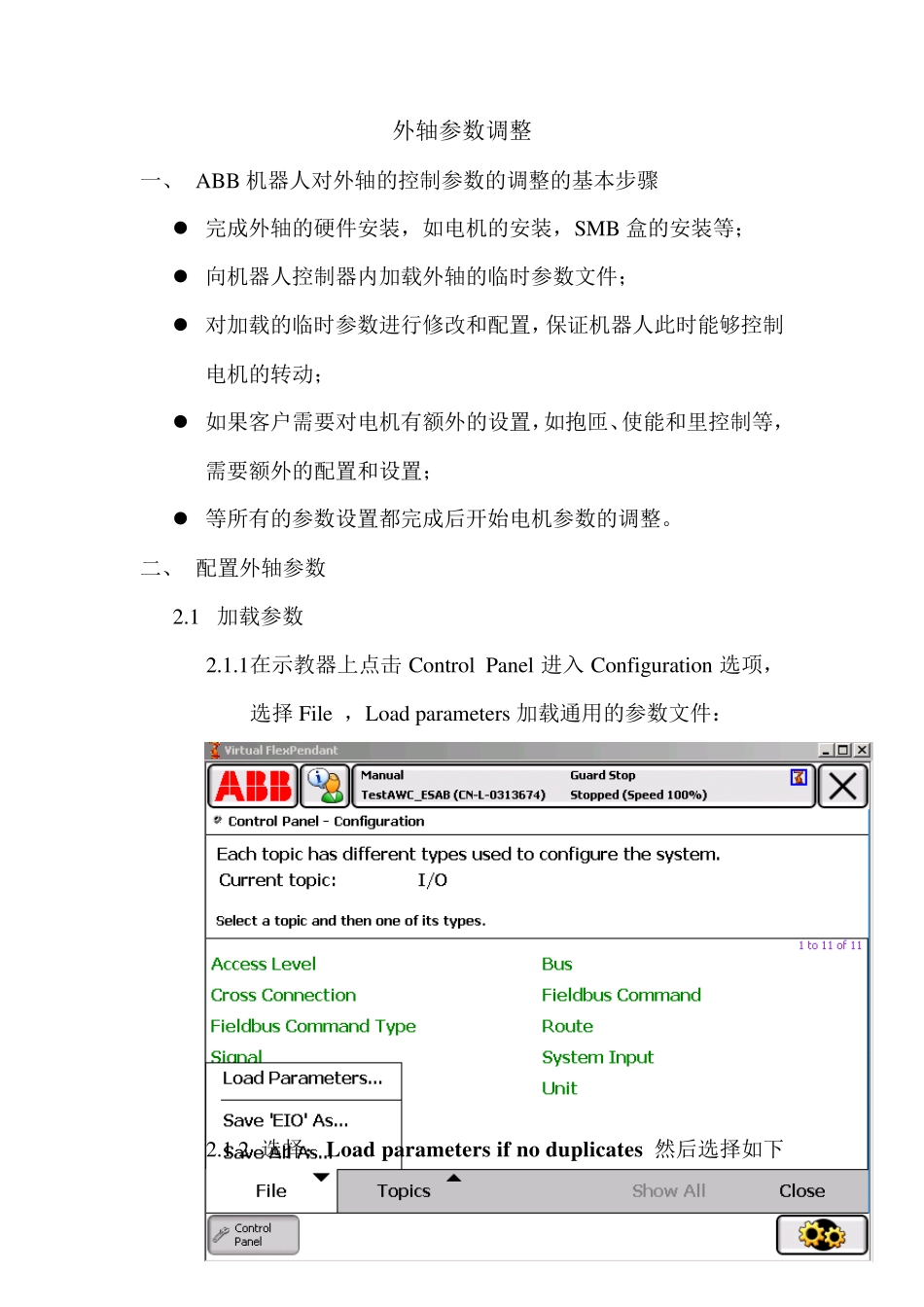
1 在示教器上点击 Control Panel 进入 Configu ration 选项,选择 File ,Load parameters 加载通用的参数文件: 2
2 选择:Load parameters if no du plicates 然后选择如下路径加载参数:Mediapool\RobotWare_5
XXXX \utility\ Additional Axis\DM1\General,然后选择相应的文件加载; 2
3 重启系统
2 配置参数 2
1 在 Motion 中选择Mechanical Unit 并且定义如下参数 Name Standby State: Yes/No Activate at Start Up Deactivation Forbidden Use Single 1 2
2 在 Motion 中选择Single 定义 Sin gle; Name Single 2
3 在 Motion 中选择Single Type 定义外轴的种类; 有以下几种选项可以选择: TRACK; FREE_ROT; EXT_POS; TOOL_ROT; 2
4 在 Motion 中选择Joints,为外轴指定外轴的序号; 如:第 10 个轴对应与 robtarget 中的eax_d 2