1 RAPID 参考手册 指令 张建辉 韩 鹏 2 1
1. AccSet—降 低 加 速 度 用 途 : 当 处 理 较 大 负 载 时 使 用 AccSet 指 令
它 允 许 减 慢 加 速 度 和 减 速 度 , 使 机 器 人 有 一 个 更 平 滑 的 运 动
该 指 令 只 能 在 主 任 务 T_ROB1 中 使 用 , 或 者 如 果 处 于 多 运 动 系 统 , 在 Motion 任 务 中
基 本 范 例 : AccSet 的 基 本 范 例 说 明 如 下
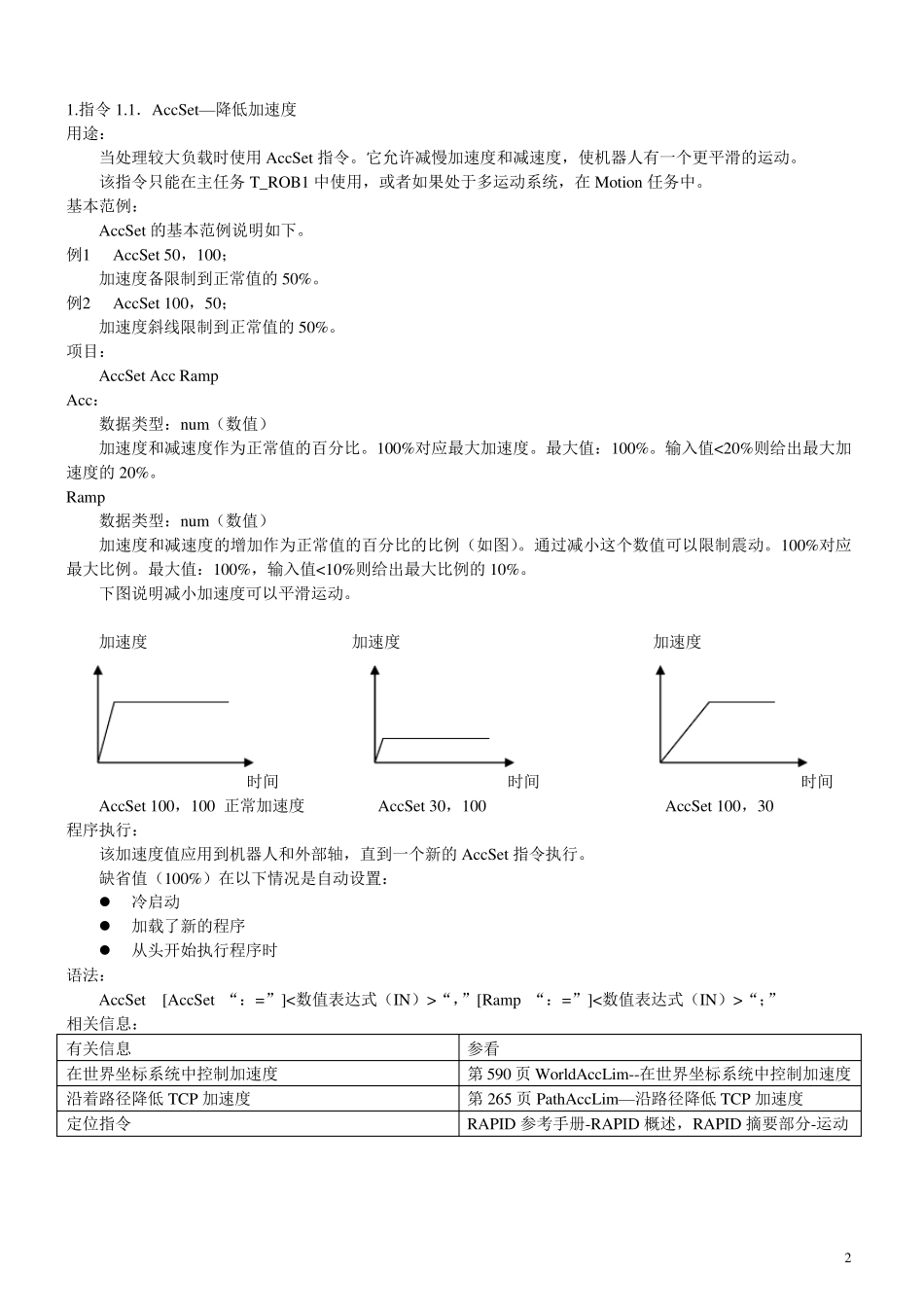
例 1 AccSet 50, 100; 加 速 度 备 限 制 到 正 常 值 的 50%
例 2 AccSet 100, 50; 加 速 度 斜 线 限 制 到 正 常 值 的 50%
项 目 : AccSet Acc Ramp Acc: 数 据 类 型 : nu m( 数 值 ) 加 速 度 和 减 速 度 作 为 正 常 值 的 百 分 比
100%对 应 最 大 加 速 度
最 大 值 : 100%