六自由度机械手因为运动轨迹复杂,坐标法显然不合适
所以本教程用快照法制作
1首 先 是 装 配 零 件 ,新 建 组 件P-HAND
ASM ,插 入m-16ib_base_any_1_1
prt,连接方式是默认,如下图: 1
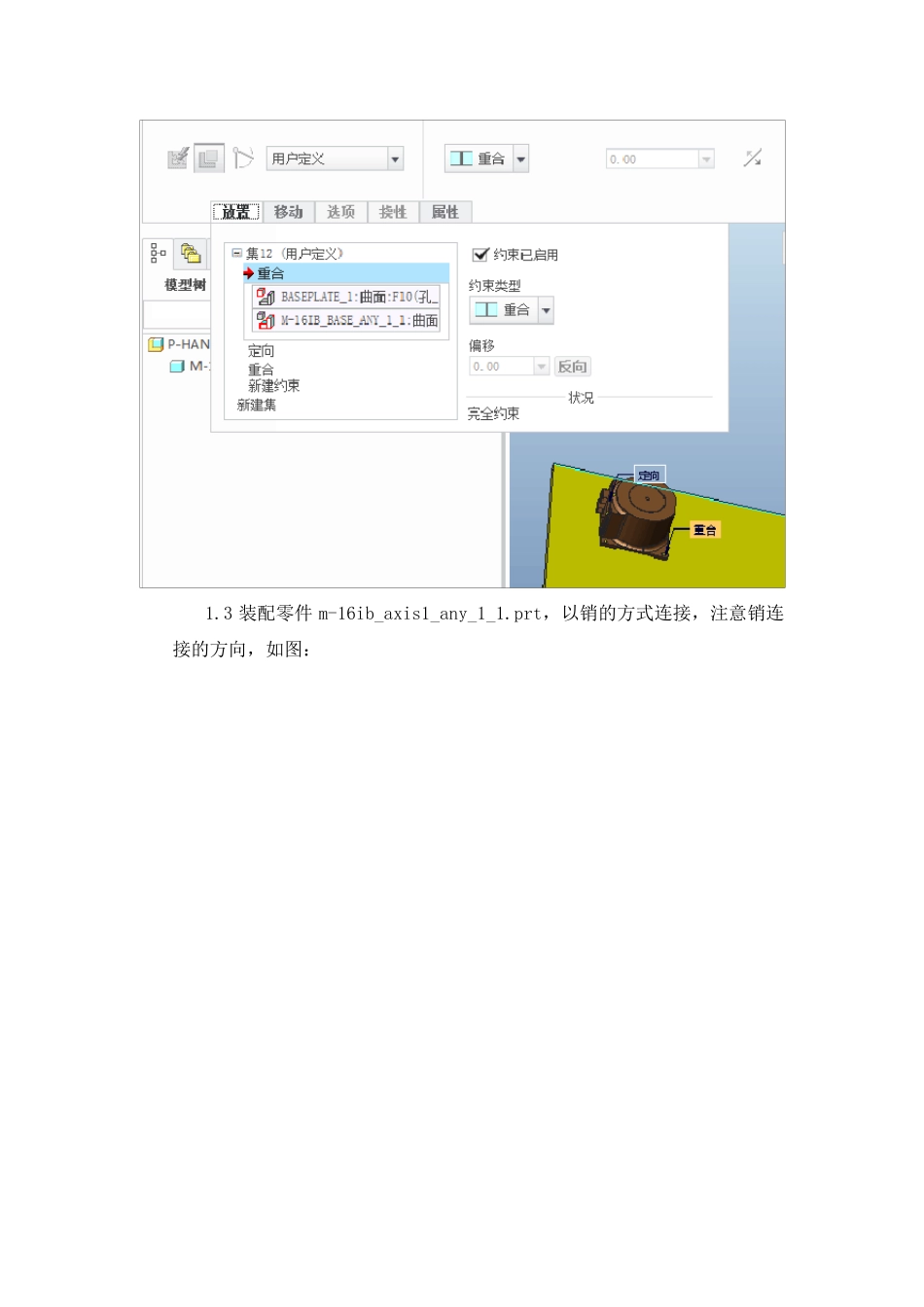
2 装配 BASEPLATE_1,板上四个孔与机械手基座 m-16ib_base_any_1_1
prt的对齐,并且基座 m-16ib_base_any_1_1
prt 底部与基板 BASEPLATE_1 表面配合,(这两个零件哪个先装配都可以,到动画制作时都作为基座处理)如下图: 1
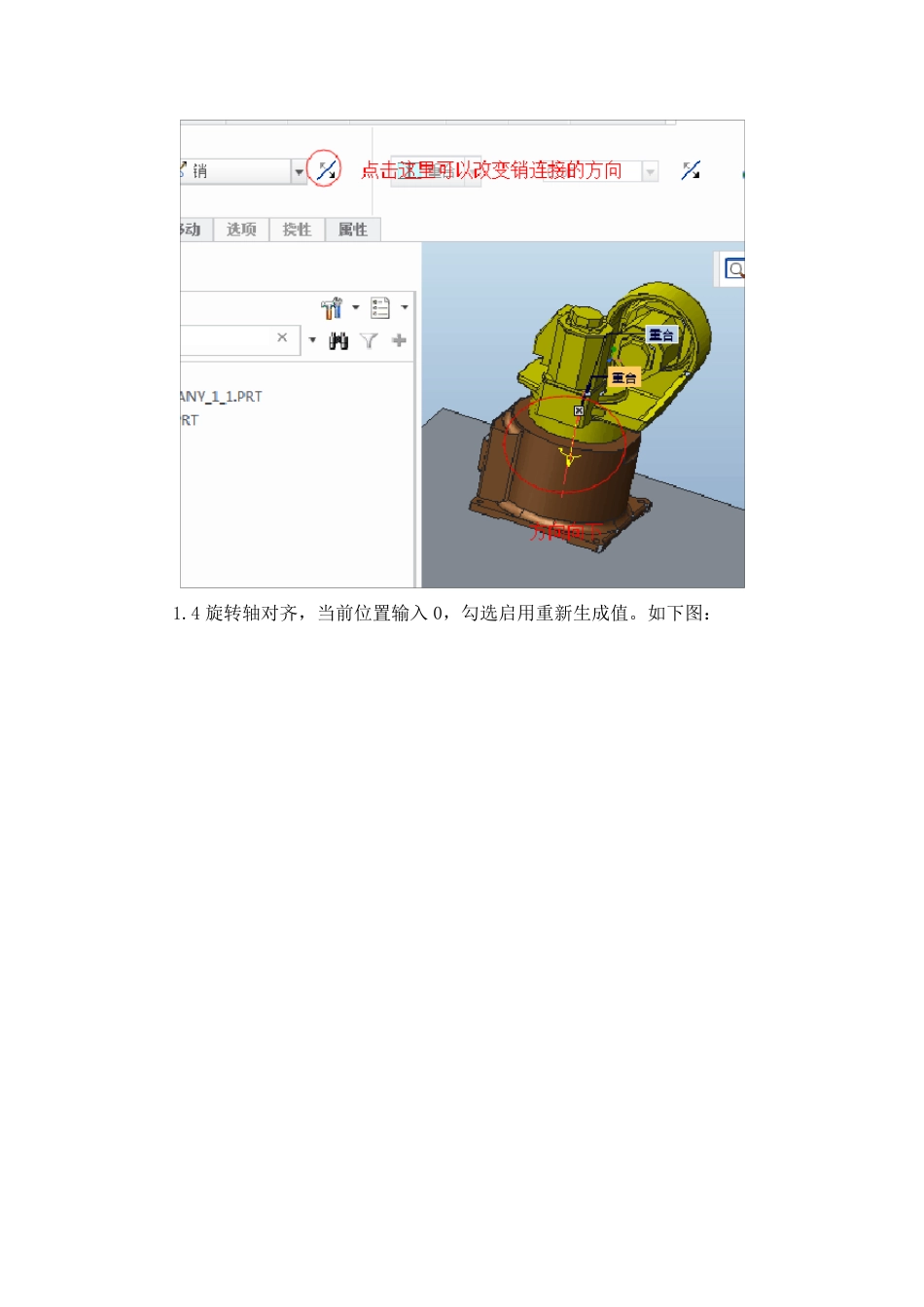
3 装配零件m-16ib_axis1_any_1_1
prt,以销的方式连接,注意销连接的方向,如图: 1
4 旋转轴对齐,当前位置输入0,勾选启用重新生成值
如下图: 1
5 销连接方式装配m-16ib_axis2_any_1_1
prt,注意销连接的方向,如下图: 平移设置中,约束类型为距离,分别选择下面两个面,偏移距离15,如下图: 旋转轴选择如下图的两个基准面,当前位置输入 0,如下图: 当前位置输入-40,零件往如下图所示的方向偏 40 度(这个要根据销连接的运动方向,如没有如下图所示的方向偏就改变销连接方向),如下图: 点击设置零位置,勾选启用重新生成值,确定完成装配,如下图: 1
6 装配零件m-16ib_axis3_any_1_1
prt,还是销连接,轴对齐,平移选择下图两个面,约束类型为重合,注意销连接方向,如下图: 旋转轴选择下面两个基准面,如下图: 当前位置输入 90,零件往如下图所示方向翻转90 度(翻转的方向取决于销的连接方向),如下图: 点击设置零位置,勾选重新生成值,如下图: 装配零件m-16ib_axis4_any_1_1
prt,销连接,如下图: 旋转轴如下图: 装配零件 m-16ib_axis5-6_any_1_1