KEBA 机械手机械手操作说明操作说明 - 1 - 0 界面简介 KeTop 是KEBA 公司专门为工业机械手手持终端提供的硬件解决方案,该手持终端运行KEBA 公司自主研发的人机界面软件TeachView
该人机界面具有易操作、人性化,符合人机工程学
TeachView 登录界面 图左侧的灯与按钮分别为状态与配置管理部分,而右侧按钮为机械手动作操作按钮,底部的按钮则是调节部分
除了上述三部分,还有急停按钮、USB 接口、手动/自动开关
左侧4 个灯表示了系统运行状态
系统正常启动为RUN 灯亮,绿色
发生错误Error 灯会亮,红色
机械手上电时Motion 灯亮,绿色
左侧7 个图标,分别为自定义界面、配置管理、变量管理、项目管理、程序管理、坐标显示、信息报告管理
右侧机械手动作操作部分,通过按“+”与“-”按键可以在编程或者点动时调节机械手的坐标位置,点击“2nd”按键可以翻到下一页(附加轴页)
Start 和 Stop 按钮与程序运行和停止有关
- 2 - 底部F1、F2、Rob、F/B、Jog 为闲置未定义按钮,Mot按钮用于机械手上电或下电, Step 用于切换程序进入单步模式还是连续模式
V+和 V-用于调节机械手运动速度
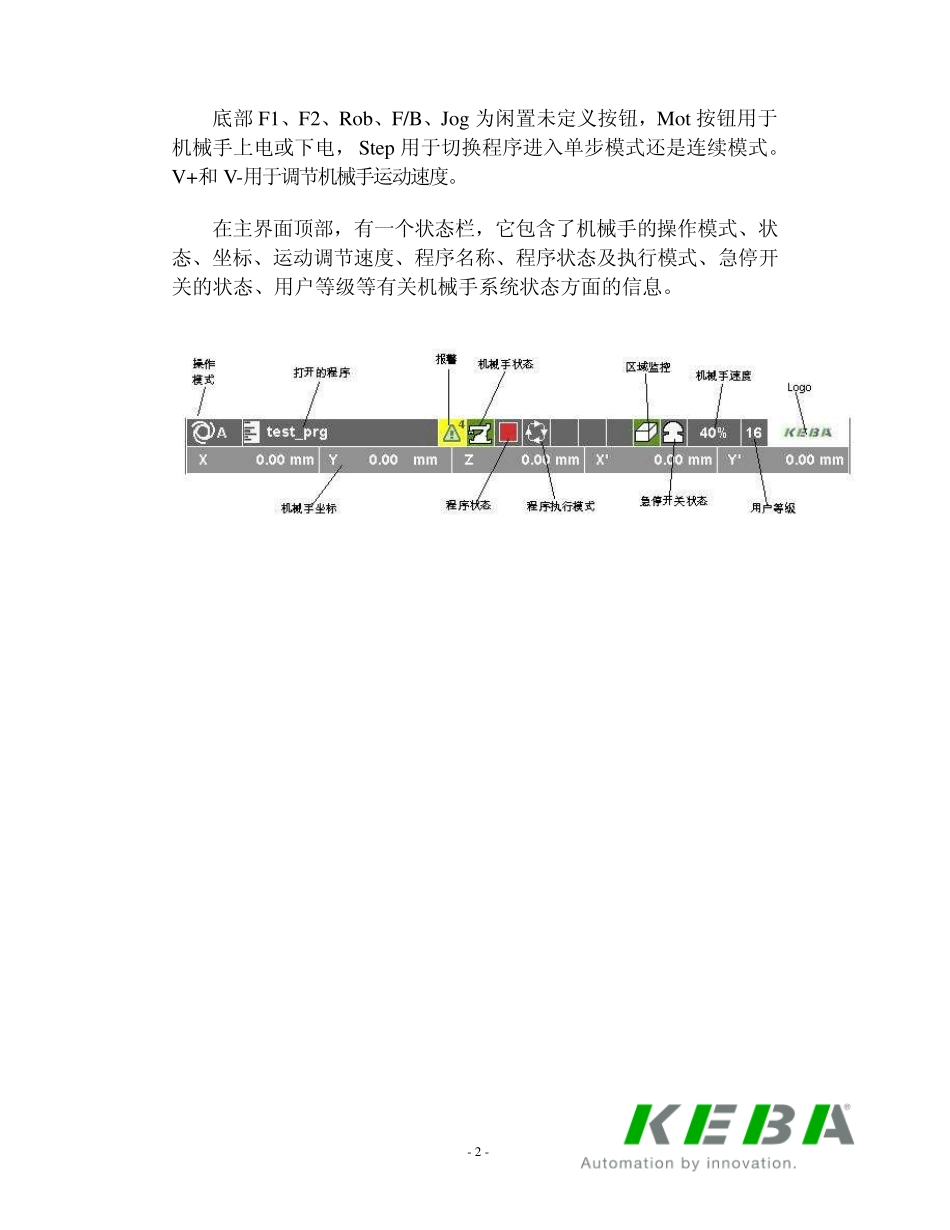
在主界面顶部,有一个状态栏,它包含了机械手的操作模式、状态、坐标、运动调节速度、程序名称、程序状态及执行模式、急停开关的状态、用户等级等有关机械手系统状态方面的信息
- 3 - 1 用户设置 1
1 数据设置数据设置 在该界面用户可以设置机械手零点位置、零点允许误差以及最大位置
零点允许误差主要用于零点的工作区域设置
当用户设置的最大位置小于系统默认的最大位置时,该最大位置有效,否则系统使用默认最大位置
2 操作数据操作数据 在该界面用户可以设置点动速度,回零点操作以及回参操作
- 4 - 2 配置管理 2