机器人定位抓取 ---视觉部分设置手册 机器人定位抓取视觉部分设置步骤如下: 一、 调整相机到适当的位置 1、 将相机连接到PC; 2、 打开In-Sight软件; 3、 将相机添加到In-Sight网络; 若相机与PC 机本地连接在相同的网段(IP 地址的前三段相同、最后一段不同,例如:PC 机IP 为192
11,相机IP 为192
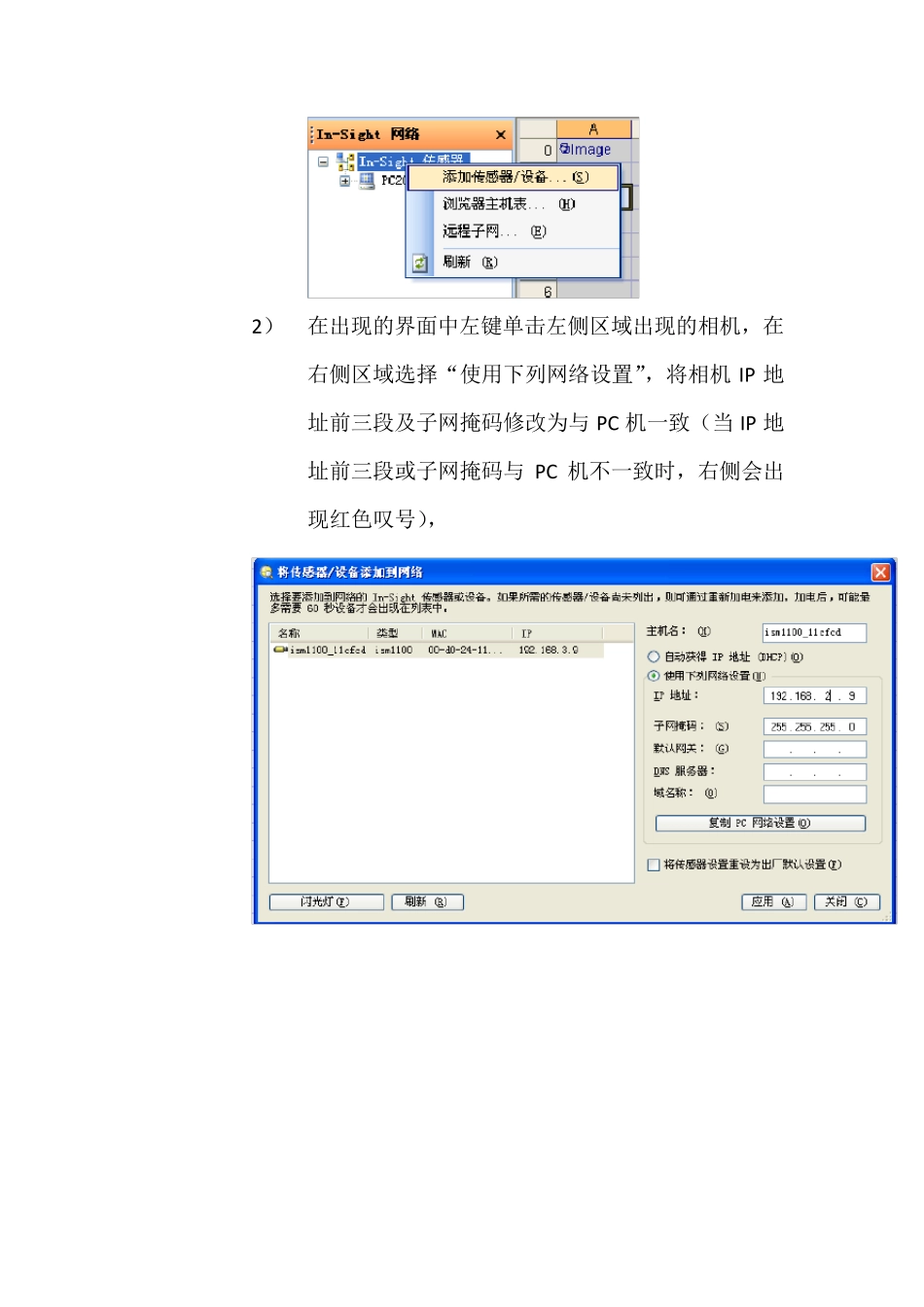
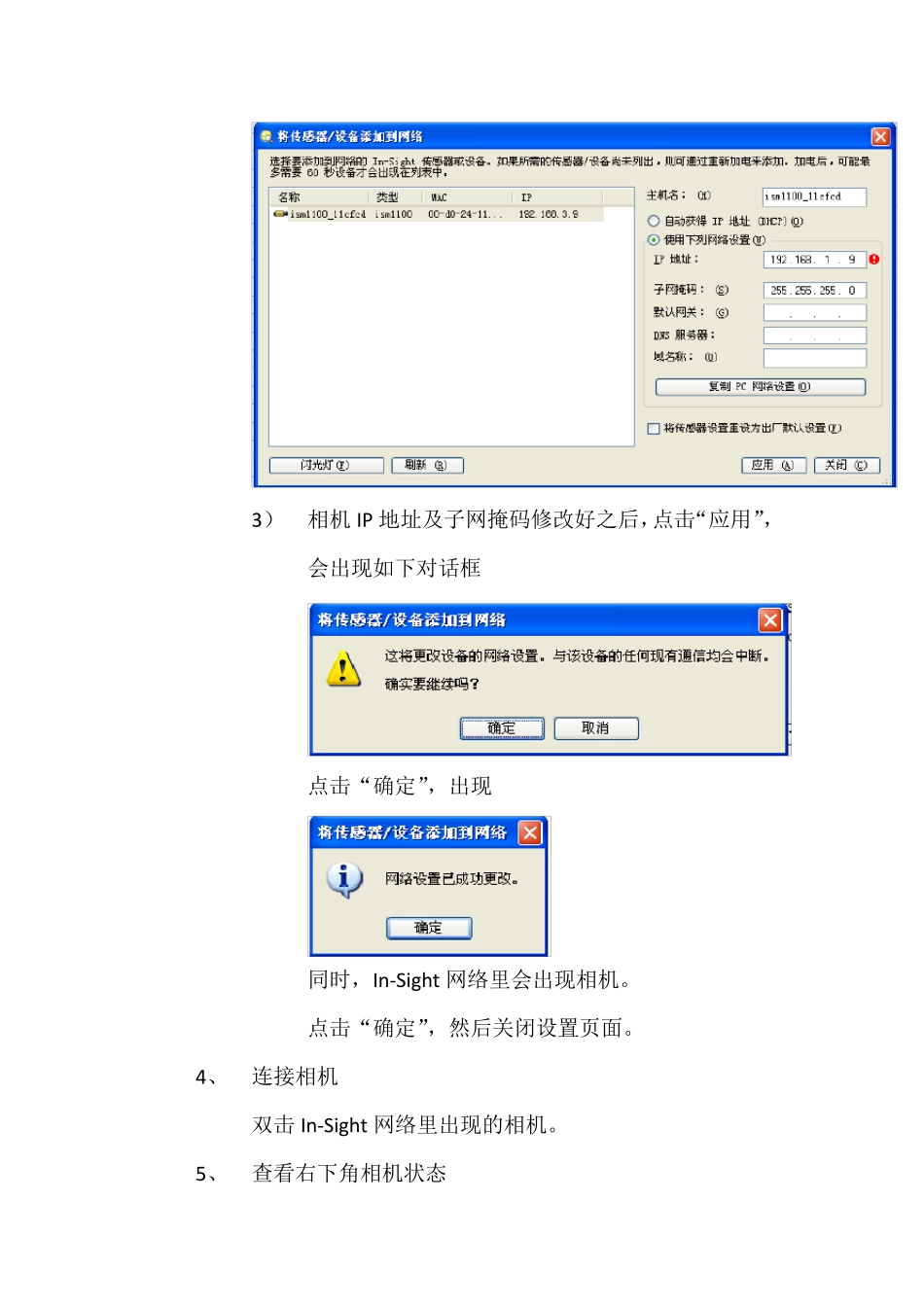
9),则在In-Sight网络里可直接找到相机,如下图所示: 若在In-Sight网络里找不到相机,则需要通过修改相机IP地址的方式将相机添加进来,方法如下: 1) 在In-Sight网络里右键单击“In-Sight传感器”,选择“添加传感器/设备” 2) 在出现的界面中左键单击左侧区域出现的相机,在右侧区域选择“使用下列网络设置”,将相机IP 地址前三段及子网掩码修改为与 P C 机一致(当 IP 地址前三段或子网掩码与 P C 机不一致时,右侧会出现红色叹号), 3) 相机IP 地址及子网掩码修改好之后,点击“应用”,会出现如下对话框 点击“确定”,出现 同时,In-Sight网络里会出现相机
点击“确定”,然后关闭设置页面
4、 连接相机 双击In-Sight网络里出现的相机
5、 查看右下角相机状态 若右下角显示,则单击上面工具栏中的“联机/脱机”图标,使相机处于脱机状态 6、 点击工具栏中的“实时”图标,使相机处于实时状态 7、 调整相机高度,使相机的视野范围(图像可见范围)满足检测需求(下图中的视野范围为 18
875) 8、 固定相机高度 二、 调整图像 1、 将检测物放置在相机视野范围内; 2、 调节镜头上的“光圈”,使图像亮度适中(此操作说明中没有使用光源,所以只需要调节光圈;若使用光源,应先将光源打开,然后同时调整光源亮度及镜头光圈,使图像亮度适中); 3、 调节镜头上的“焦距调节