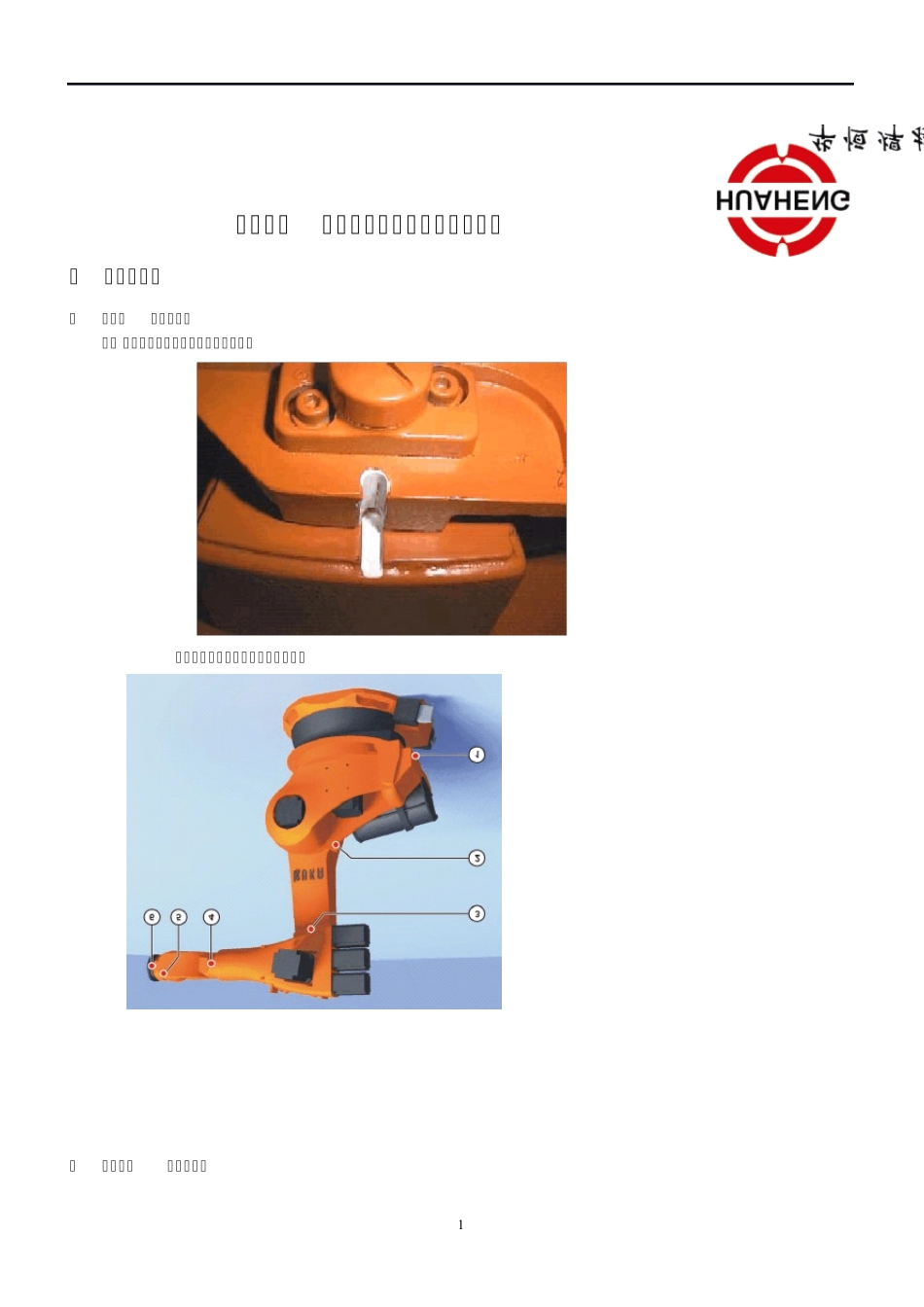
1KUKA机器人调试标准化作业指导书一校各轴零点�本体轴预校正位置T2 模式下将待校正轴移到预校正位置
白线标记位于机器人上的下列位置:�外部轴的预校正位置2当轴已经处于预校正位置时,转到 T1模式,进行零点校正
步骤如下:a)
选择菜单:准备运行→零点校正→电子测量器→标准→执行零点校正
选项窗口打开
所有待校正的轴都显示出来
编号最小的轴已被标记
从选项窗口中标记的轴上取下测量筒的防护盖
将 EMT拧到测量筒上
然后将测量导线连到 EMT上,并连接到(RDW)接线盒的接口X32上
按下软键零点校正
按下驱动开关和启动键
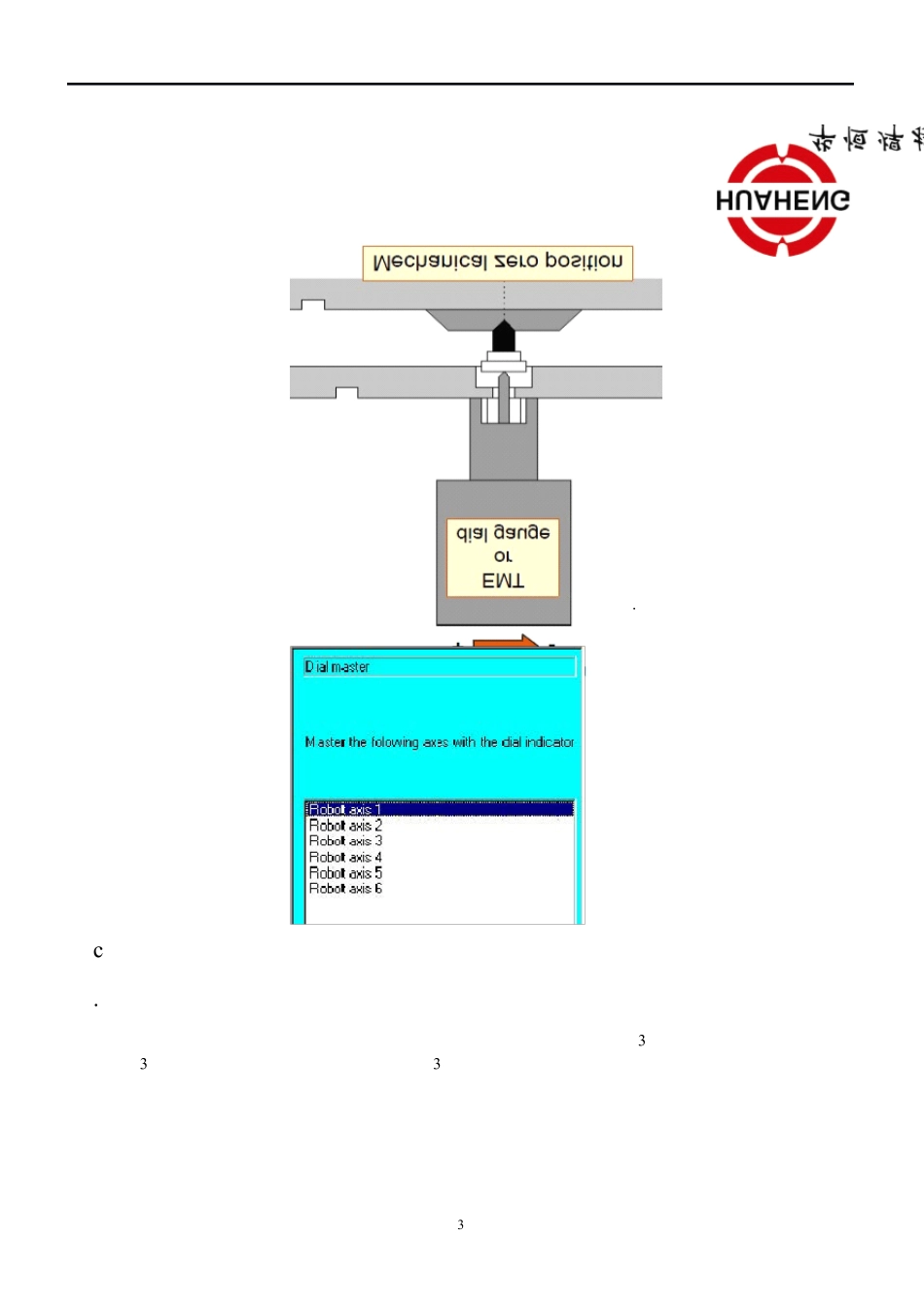
当 EMT识别到测量切口的最低点(见下图)时,则已到达零点位置
机器人自动停止运行
该轴在选项窗口中消失
将测量导线从 EMT上取下
从测量筒上取下 EMT,并将防护盖重新装好
对所有待校正的轴重复步骤 b至 e
所有的轴校正完,窗口上出现“没有轴需要校正”
将测量导线从接口 X32上取下
用软键关闭来退出选项窗口
3�校正零点时有以下几点需要注意:a)一个轴也许仅从“+”到“-”就可以移动到机械零点位置
如果一个轴必须从“-”到“+”转动,它首先必须转过预校正位置的标记处,然后再返回这个标记
这是很重要的,可以消除齿轮传动的反向间隙
b)需要校正的轴按顺序显示(如下图)
下一个需要校正的轴用彩色背景显示
已经校正好的轴不在列表中列出,如果想重新校正,必须先取消校正
c)每个轴校正完后记住拧紧检测头上的保护帽
检查设置的减速比�无论直线轴(长度)还是旋转轴(角度),都可以用量具标好位置(1米或 360度),然后手动移动该轴 1米或 360度,看示教盒上显示的是否是 1米或 360度
查看步骤:显示→实际位置→同轴相关的4�在外部轴联动的模式下,移动该外部轴,直线轴的 TCP应固定在某一位置,旋转