撤辅助:点焊:俑腫焊枪机樣参放僮定2
伺服焊枪机械参数设定:点焊---伺服焊枪机械参数设定,如下輸入范Bb 口-甸如果设置焊枪 1,射枪编号就写討疋简J/一
设定参数:1
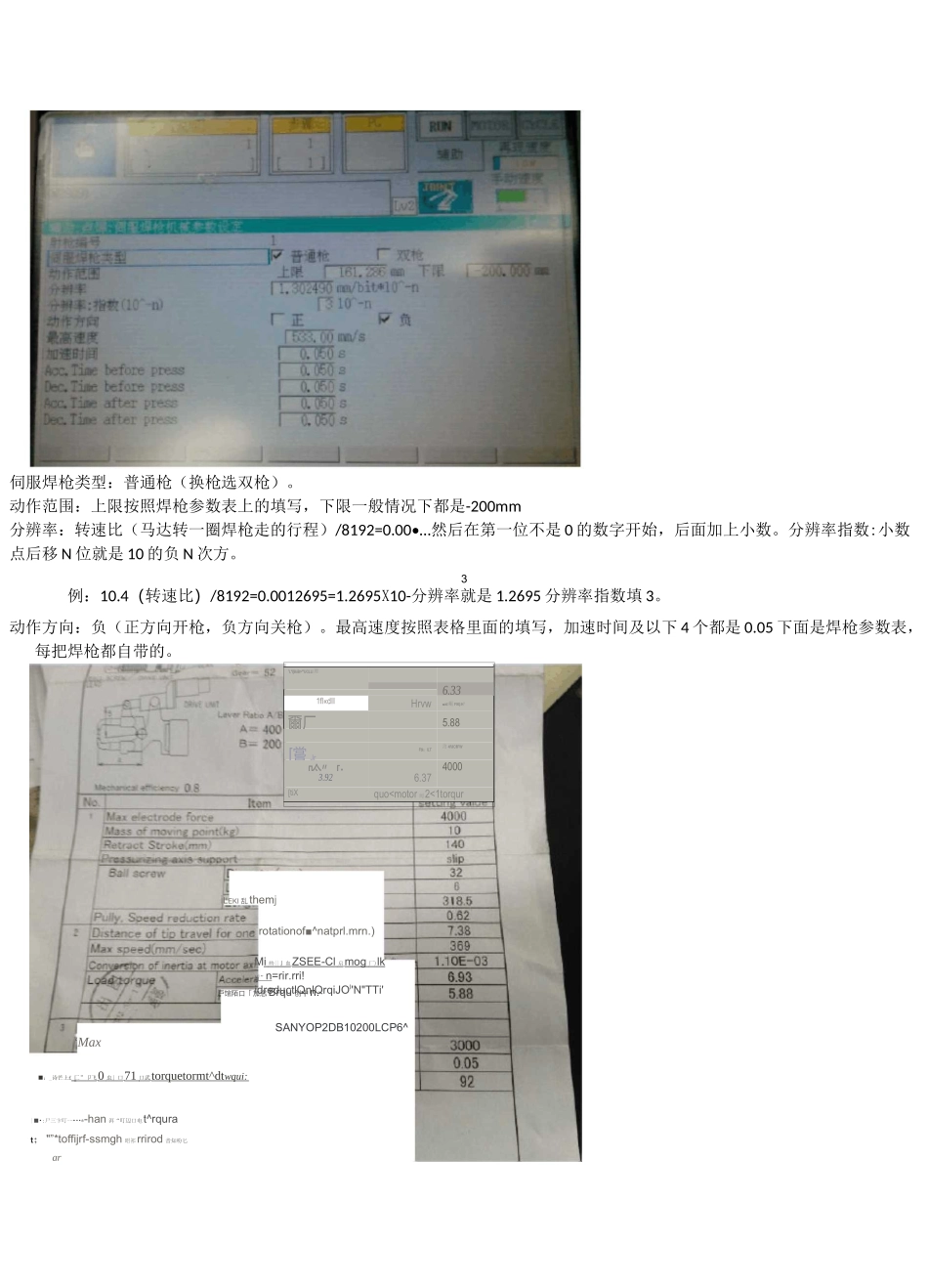
打开辅助功能界面,如下川崎机器人伺服焊枪标定伺服焊枪类型:普通枪(换枪选双枪)
动作范围:上限按照焊枪参数表上的填写,下限一般情况下都是-200mm分辨率:转速比(马达转一圈焊枪走的行程)/8192=0
00•…然后在第一位不是 0 的数字开始,后面加上小数
分辨率指数:小数点后移 N 位就是 10 的负 N 次方
4(转速比)/8192=0
0012695=1
2695X10-分辨率就是 1
2695 分辨率指数填 3
动作方向:负(正方向开枪,负方向关枪)
最高速度按照表格里面的填写,加速时间及以下 4 个都是 0
05 下面是焊枪参数表,每把焊枪都自带的
1L"i[ilkiB>"kUCLLI 理6
331fl«dIIHrvw■vd 崛 FIK|:H1爾厂5
88[嘗 JrFbl:lLT泊 4f\IICflFW吟”[:40003
37[tiXquo