下载后可任意编辑现代控制理论实验报告——倒立摆小组成员:指导老师:2024
5实验一 建立一级倒立摆的数学模型下载后可任意编辑一、 实验目的学习建立一级倒立摆系统的数学模型,并进行 Matlab 仿真
二、 实验内容写出系统传递函数和状态空间方程,用 Matlab 进行仿真
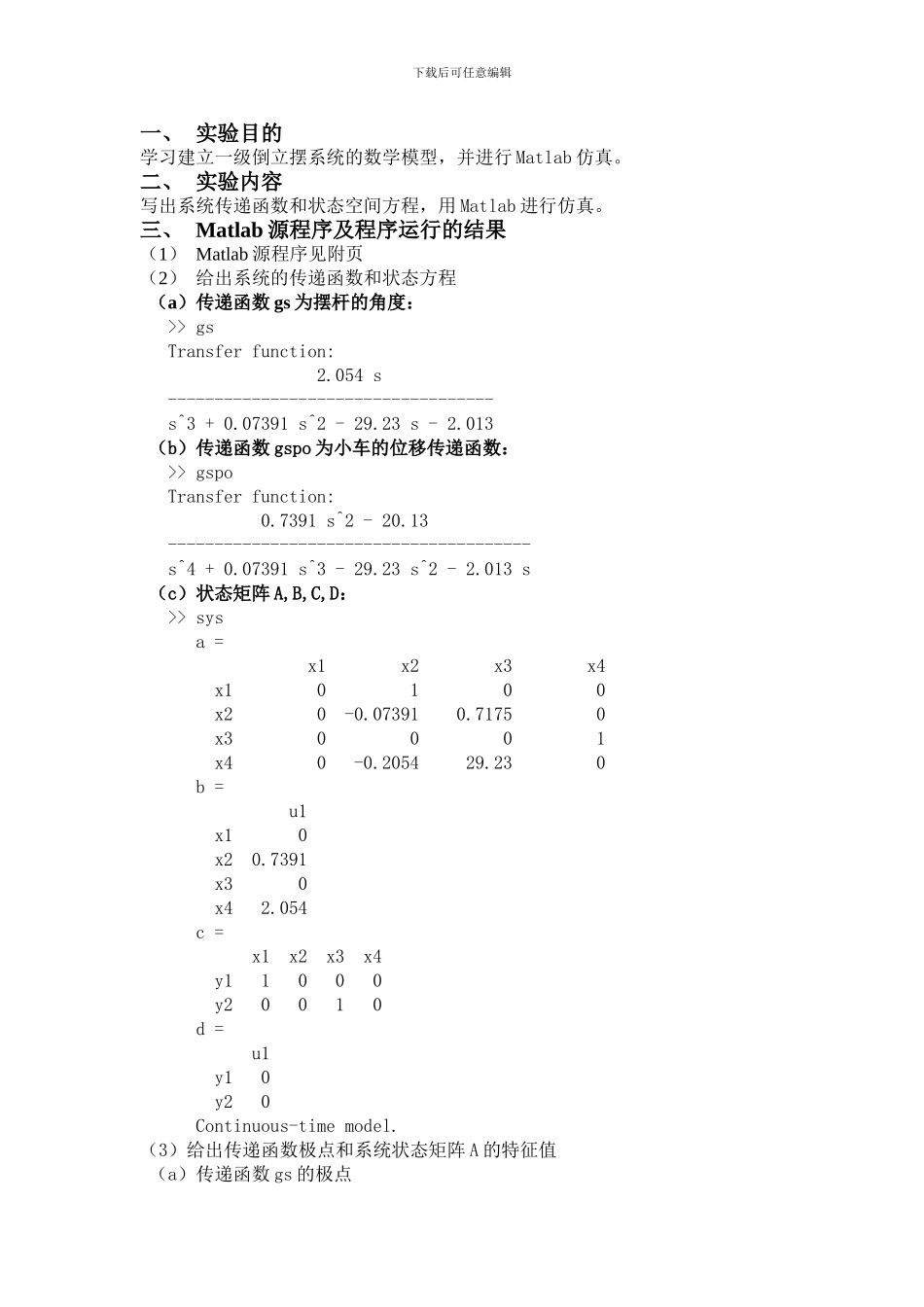
三、 Matlab 源程序及程序运行的结果(1) Matlab 源程序见附页(2) 给出系统的传递函数和状态方程(a)传递函数 gs 为摆杆的角度:>> gsTransfer function: 2
054 s-----------------------------------s^3 + 0
07391 s^2 - 29
23 s - 2
013(b)传递函数 gspo 为小车的位移传递函数:>> gspoTransfer function: 0
7391 s^2 - 20
13---------------------------------------s^4 + 0
07391 s^3 - 29
23 s^2 - 2
013 s(c)状态矩阵 A,B,C,D:>> sysa = x1 x2 x3 x4 x1 0 1 0 0 x2 0 -0
07391 0
7175 0 x3 0 0 0 1 x4 0 -0
2054 29
23 0b = u1 x1 0 x2 0
7391 x3 0 x4 2
054c = x1 x2 x3 x4 y1 1 0 0 0 y2 0 0 1 0d = u1 y1 0 y2 0Continuous-time model
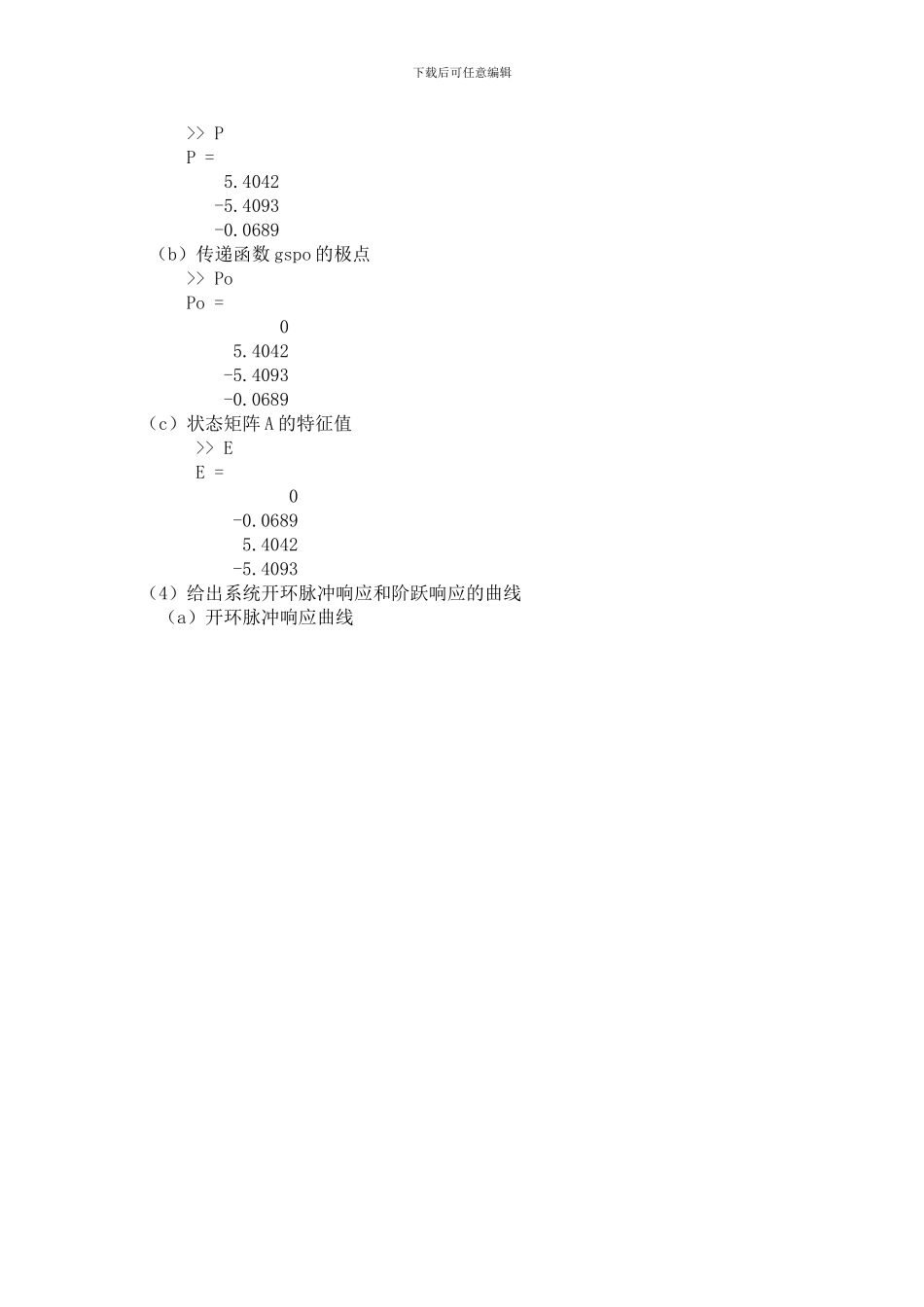
(3)给出传递函数极点和系统状态矩阵 A 的特征值(a)传递函数 gs 的极点下载后可任意编辑>> PP = 5
4042 -5
4093 -0
0689(b)传递函数 gspo 的极点>> PoPo = 0 5
4042 -5
4093 -0