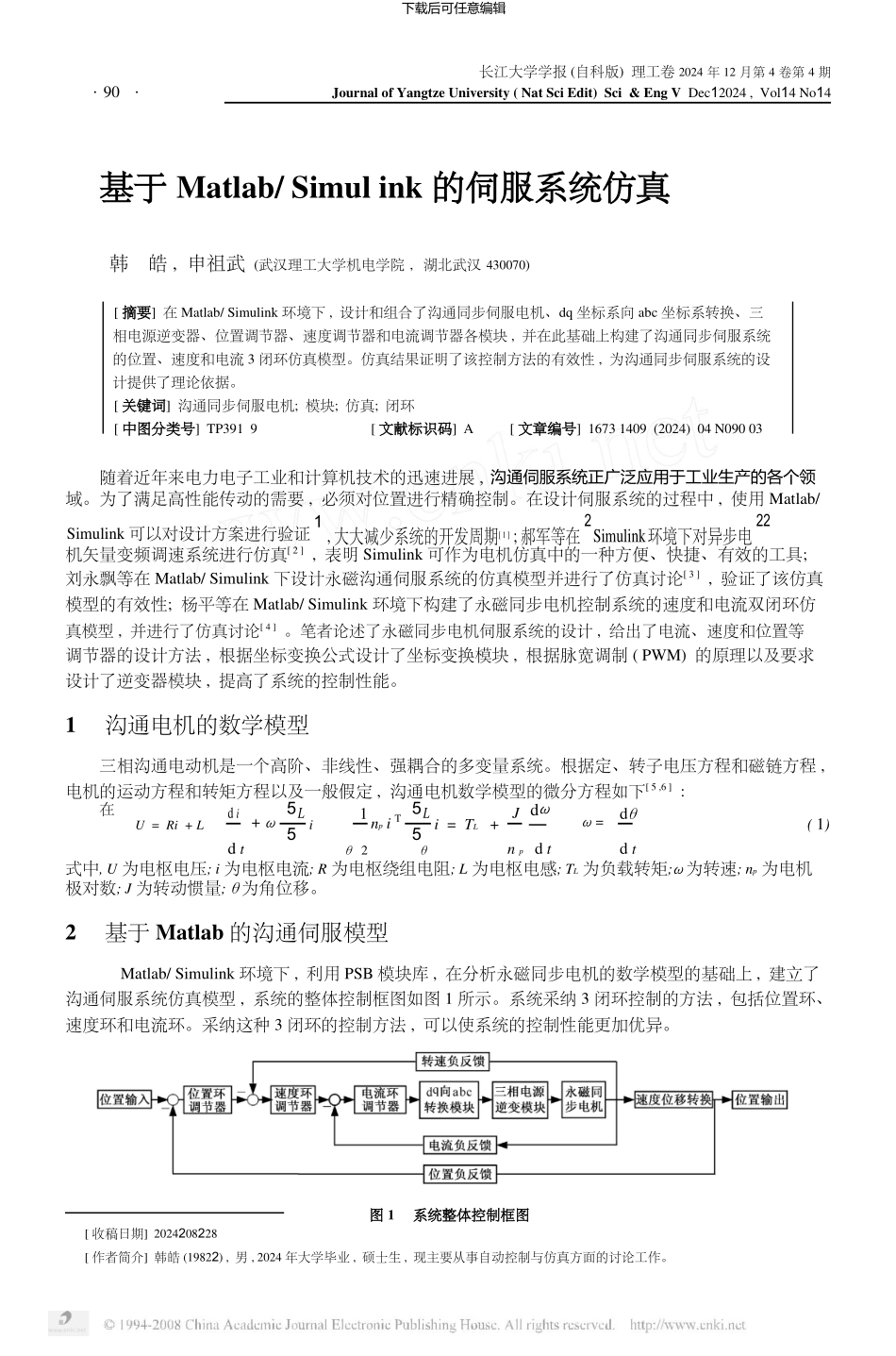
下载后可任意编辑·90 ·长江大学学报 (自科版) 理工卷 2024 年 12 月第 4 卷第 4 期Journal of Yangtze University ( Nat Sci Edit) Sci & Eng V Dec12024 , Vol14 No14基于 Matlab/ Simul ink 的伺服系统仿真 韩 皓 , 申祖武 (武汉理工大学机电学院 , 湖北武汉 430070)[ 摘要] 在 Matlab/ Simulink 环境下 , 设计和组合了沟通同步伺服电机、dq 坐标系向 abc 坐标系转换、三相电源逆变器、位置调节器、速度调节器和电流调节器各模块 , 并在此基础上构建了沟通同步伺服系统的位置、速度和电流 3 闭环仿真模型
仿真结果证明了该控制方法的有效性 , 为沟通同步伺服系统的设计提供了理论依据
[ 关键词] 沟通同步伺服电机; 模块; 仿真; 闭环[ 中图分类号] TP391 9[ 文献标识码] A [ 文章编号] 1673 1409 (2024) 04 N090 03 随着近年来电力电子工业和计算机技术的迅速进展 , 沟通伺服系统正广泛应用于工业生产的各个领域
为了满足高性能传动的需要 , 必须对位置进行精确控制
在设计伺服系统的过程中 , 使用 Matlab/Simulink 可以对设计方案进行验证 1, 大大减少系统的开发周期[ 1 ] ; 郝军等在2 Simulink 环境下对异步电22机矢量变频调速系统进行仿真[ 2 ] , 表明 Simulink 可作为电机仿真中的一种方便、快捷、有效的工具;刘永飘等在 Matlab/ Simulink 下设计永磁沟通伺服系统的仿真模型并进行了仿真讨论[ 3 ] , 验证了该仿真模型的有效性; 杨平等在 Matlab/ Simulink 环境下构建了永磁同步电机控制系统的速度和电流双闭环仿真模型 , 并