1 专 业 实 验 报 告 学生姓名 学号 指导老师 实验名称 倒立摆与自动控制原理实验 实验时间 7 月5 日 一、实验内容 (1)完成
直线倒立摆建模、仿真与分析; (2)完成直线一级倒立摆PID控制实验: 1)理解并掌握PID控制的原理和方法,并应用于直线一级倒立摆的控制; 2)在Simulink中建立直线一级倒立摆模型,通过实验的方法调整PID参数并仿真波形; 3)当仿真效果达到预期控制目标后,下载程序到控制机,进行物理实验并获得实际运行图形
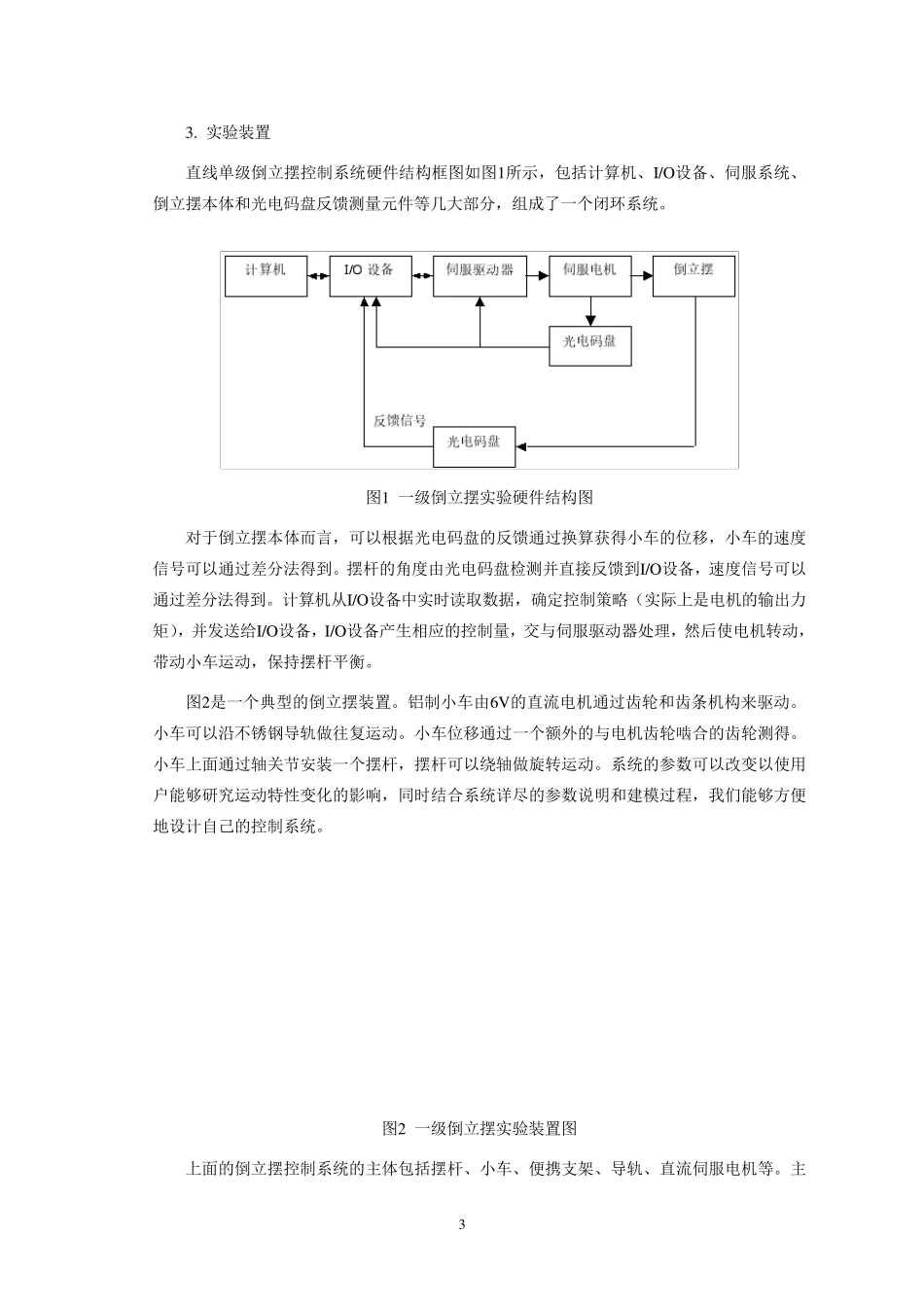
二、实验过程 1
实验原理 (1)直线倒立摆建模方法 倒立摆是一种有着很强非线性且对快速性要求很高的复杂系统,为了简化直线一级倒立摆系统的分析,在实际的建模过程中,我们做出以下假设: 1、 忽略空气阻力; 2、 将系统抽象成由小车和匀质刚性杆组成; 3、 皮带轮和传送带之间无滑动摩擦,且传送带无伸长现象; 4、 忽略摆杆和指点以及各接触环节之间的摩擦力
2 实际系统的模型参数如下表所示: M 小车质量 0
618 kg m 摆杆质量 0
0737 kg b 小车摩擦系数 0
1 N/m/sec l 摆杆转动轴心到杆质心的长度 0
1225 m I 摆杆惯量 0
0034 kg*m*m g 重力加速度 9
m/s (3)直线一级倒立摆PID控制原理 经典控制理论的研究对象主要是单输入单输出的系统,控制器设计时一般需要有关被控对象的较精确模型
PID控制器因其结构简单,容易调节,且不需对系统建立精确的模型,在控制上应用较广
比例(P作用)增大,系统响应快,对提高稳态精度有益,但过大易引起过度的振荡,降低相对稳定性
微分(D作用)对改善动态性能和抑制超调有利,但过强,即校正装置的零点靠近原点或者使开环的截止频率增大,不仅不能改善动态性能,反而易引入噪声干扰
积分(I作用)主要是消除或减弱稳态误差,但会延长调整时