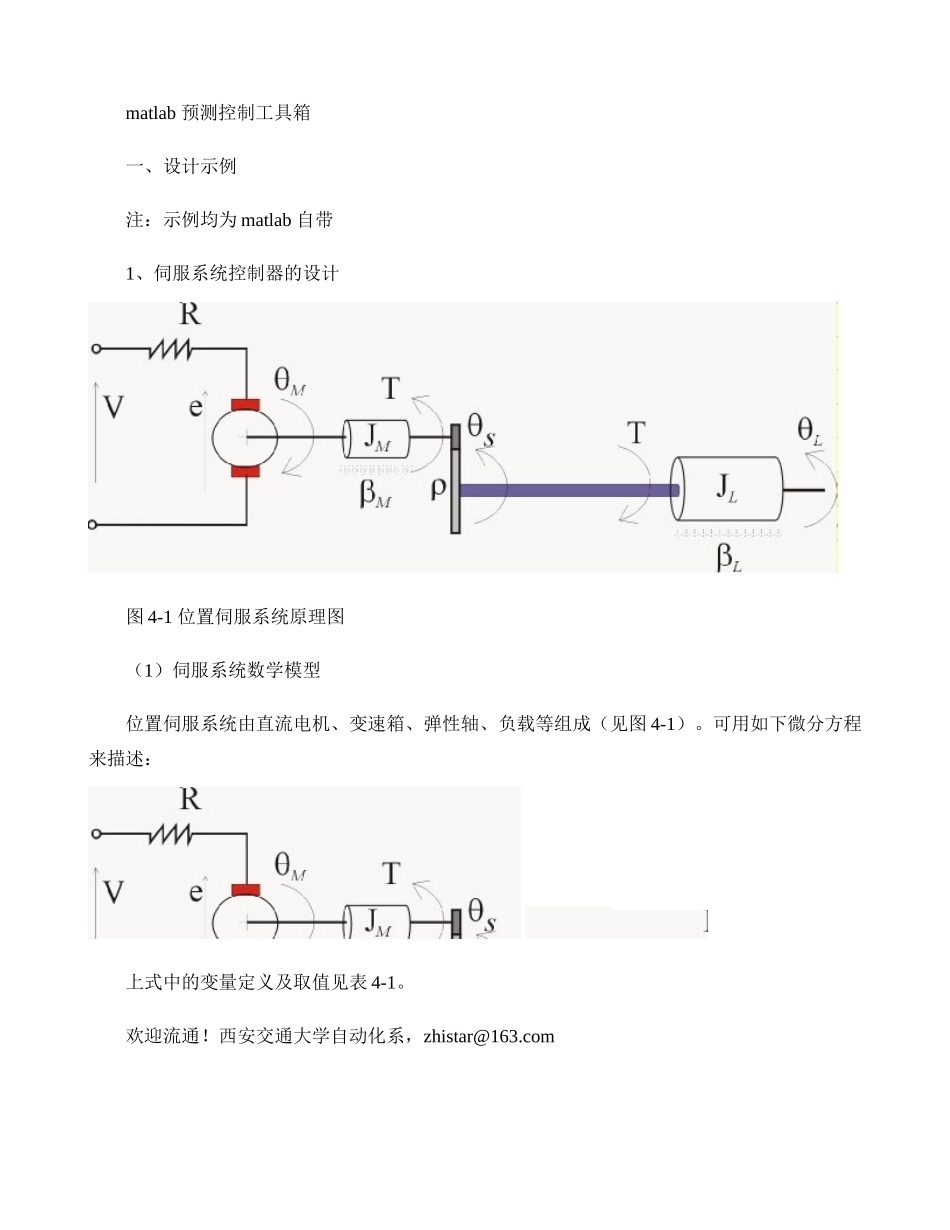
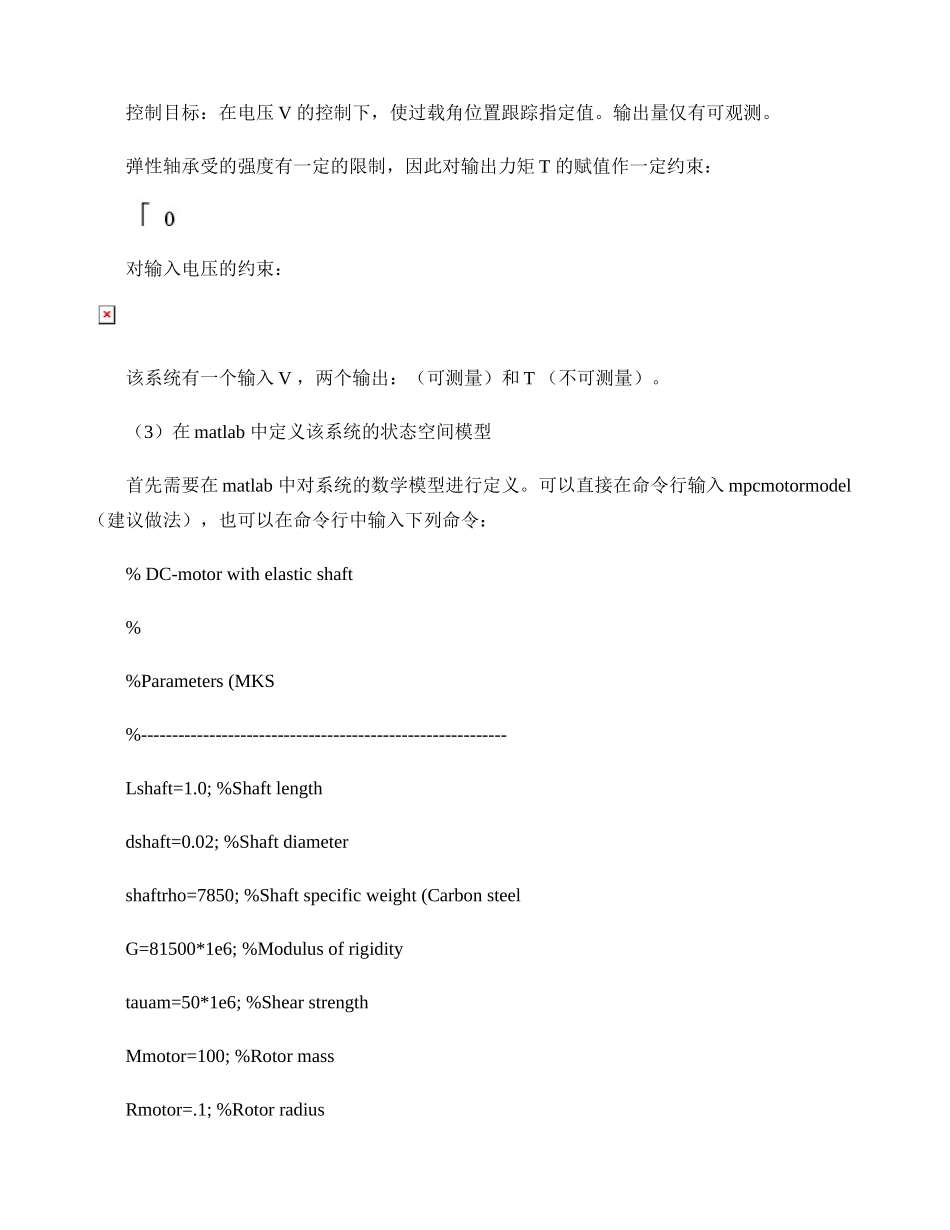
matlab 预测控制工具箱一、设计示例注:示例均为 matlab 自带1、伺服系统控制器的设计 图 4-1 位置伺服系统原理图(1)伺服系统数学模型位置伺服系统由直流电机、变速箱、弹性轴、负载等组成(见图 4-1)
可用如下微分方程来描述: 上式中的变量定义及取值见表 4-1
西安交通大学自动化系,zhistar@163
com 2将上述微分方程写成状态方程形式,有 其中,
(2)控制目标及约束控制目标:在电压 V 的控制下,使过载角位置跟踪指定值
输出量仅有可观测
弹性轴承受的强度有一定的限制,因此对输出力矩 T 的赋值作一定约束: 对输入电压的约束: 该系统有一个输入 V ,两个输出:(可测量)和 T (不可测量)
(3)在 matlab 中定义该系统的状态空间模型首先需要在 matlab 中对系统的数学模型进行定义
可以直接在命令行输入 mpcmotormodel (建议做法),也可以在命令行中输入下列命令:% DC-motor with elastic shaft%%Parameters (MKS%-----------------------------------------------------------Lshaft=1
0; %Shaft lengthdshaft=0
02; %Shaft diametershaftrho=7850; %Shaft specific weight (Carbon steelG=81500*1e6; %Modulus of rigiditytauam=50*1e6; %Shear strengthMmotor=100; %Rotor massRmotor=
1; %Rotor radiusJmotor=
5*Mmotor*Rmotor^2; %Rotor axial moment of inertia Bmot