单回路控制系统整定 一、实验目的 (1) 掌握动态建模的创建方法
(2) 掌握单回路控制系统的理论整定方法和工程整定方法
(3) 了解调节器参数对控制品质的影响
熟悉控制线性系统仿真常用基本模块的用法 二、实验仪器 计算机一台、MATLAB 软件 三、实验内容: 用SIMULINK 建立被控对象的传递函数为41( )101G xs,系统输入为单位阶跃,采用PID 控制器进行闭环调节
①练习模块、连线的操作,并将仿真时间定为300 秒,其余用缺省值; ②试用稳定边界法和衰减曲线法设置出合适的PID 参数,得出满意的响应曲线
③设计M 文件在一个窗口中绘制出系统输入和输出的曲线,并加图解
四、实验原理
PID(比例-积分-微分)控制器是目前在实际工程中应用最为广泛的一种控制策略
PID 算法简单实用,不要求受控对象的精确数学模型
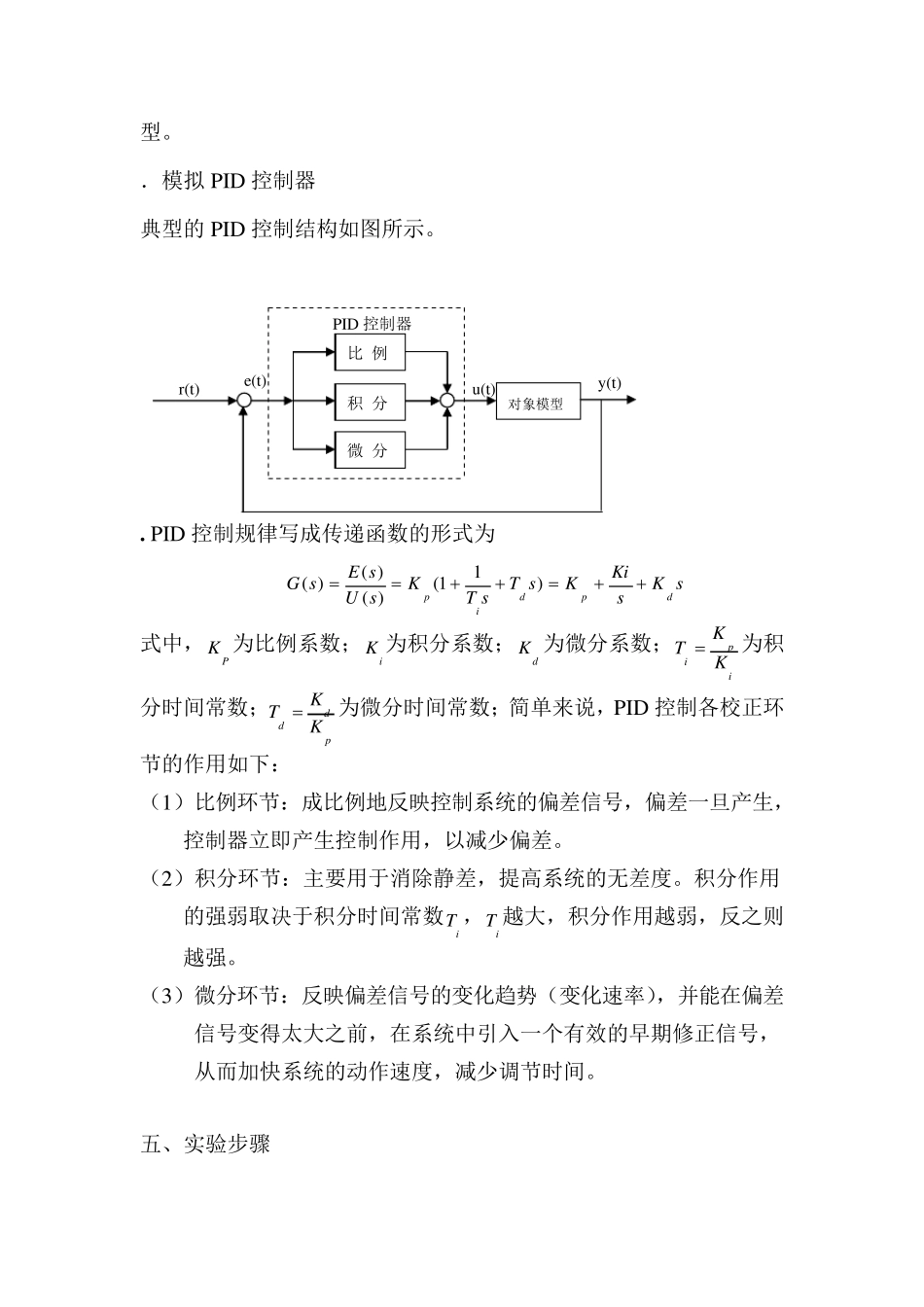
.模拟PID 控制器 典型的PID 控制结构如图所示
PID 控制规律写成传递函数的形式为 sKsKiKsTsTKsUsEsGdpdip)11()()()( 式中,PK 为比例系数;iK 为积分系数;dK 为微分系数;ipiKKT 为积分时间常数;pddKKT 为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差
(2)积分环节:主要用于消除静差,提高系统的无差度
积分作用的强弱取决于积分时间常数iT ,iT 越大,积分作用越弱,反之则越强
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间
五、实验步骤 比 例 积 分 微 分 对象模型 PID 控制器 r(t) y (t) u (