单回路控制系统整定实验报告 一、实验目的 (1)掌握动态模型的创建方法
(2)掌握单回路控制系统的理论整定方法和工程整定方法
(3)了解调节器参数对控制品质的影响
二、实验仪器 计算机一台 三、实验步骤 (1)启动计算机,运行MATLAB 应用程序
(2)在MATLAB 命令窗口输入Smulink,启动Simulink
(3)在Simulink 库浏览窗口中,单击工具栏中的新建窗口快捷按钮或在Simulink 库窗口中选择菜单命令FileNewModeel,打开一个标题为“Untitled”的空白模型编辑窗口
(4)用鼠标双击信号源模块库(Source)图标,打开信号源模块库,将光标移动到阶跃信号模块(Step)的图标上,按住鼠标左键,将其拖放到空白模型编辑窗口中
用鼠标双击附加模块库(Simulink Extra)图标,打开A 到底提哦哪里 Liner 模块库,将光标移到 PID Controller图标上,按住鼠标左键,将其拖放到空白模块编辑窗口中
(5)用同样的方法从连续系统模块库(Continuous)、接受模块库(Sinks)和数学运算模块库(Math Operations)中把传递函数模块(Transfer Fcn)、示波器模块(Scope)和加法器模块(Sum)拖放到空白模型编辑窗口中
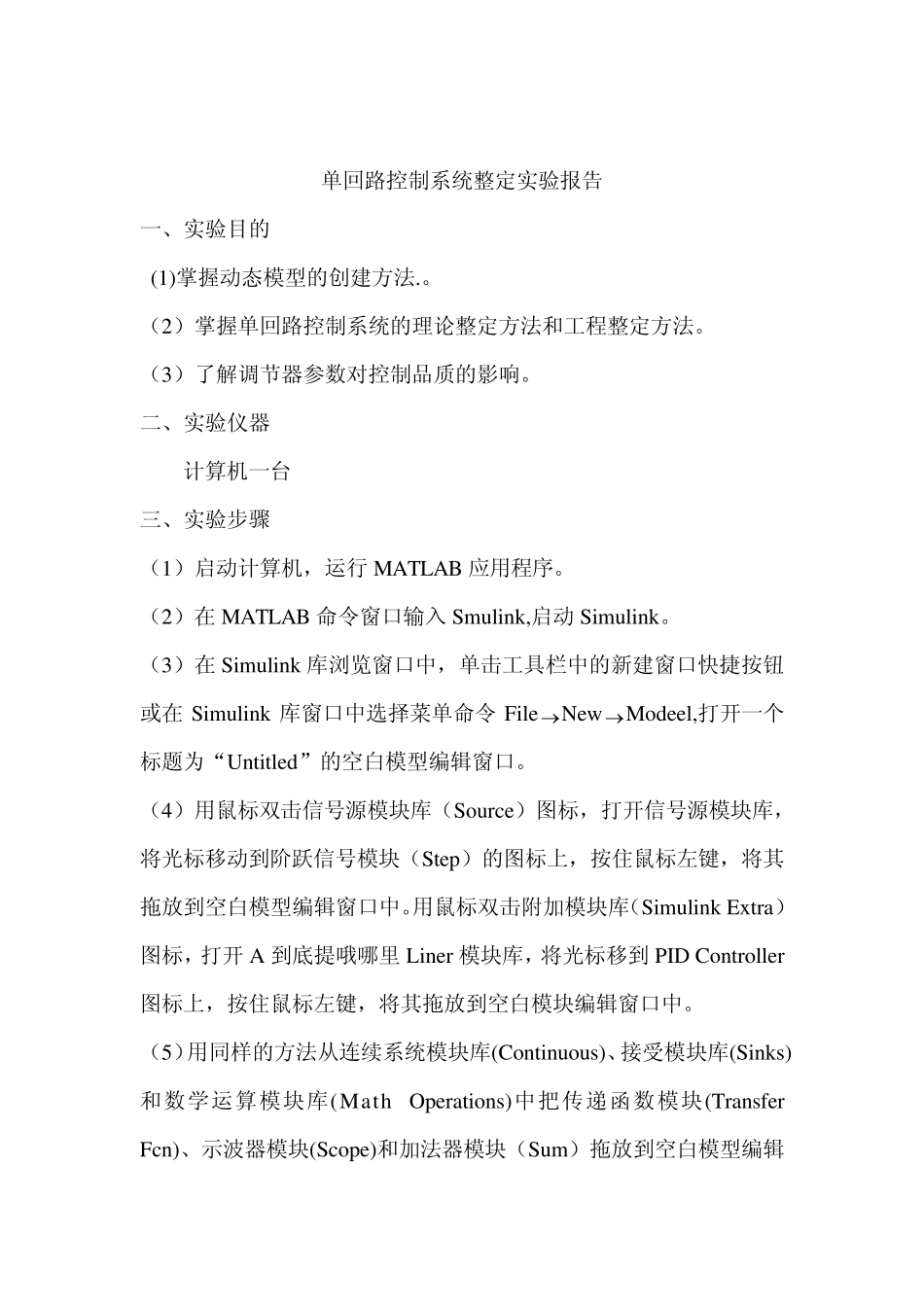
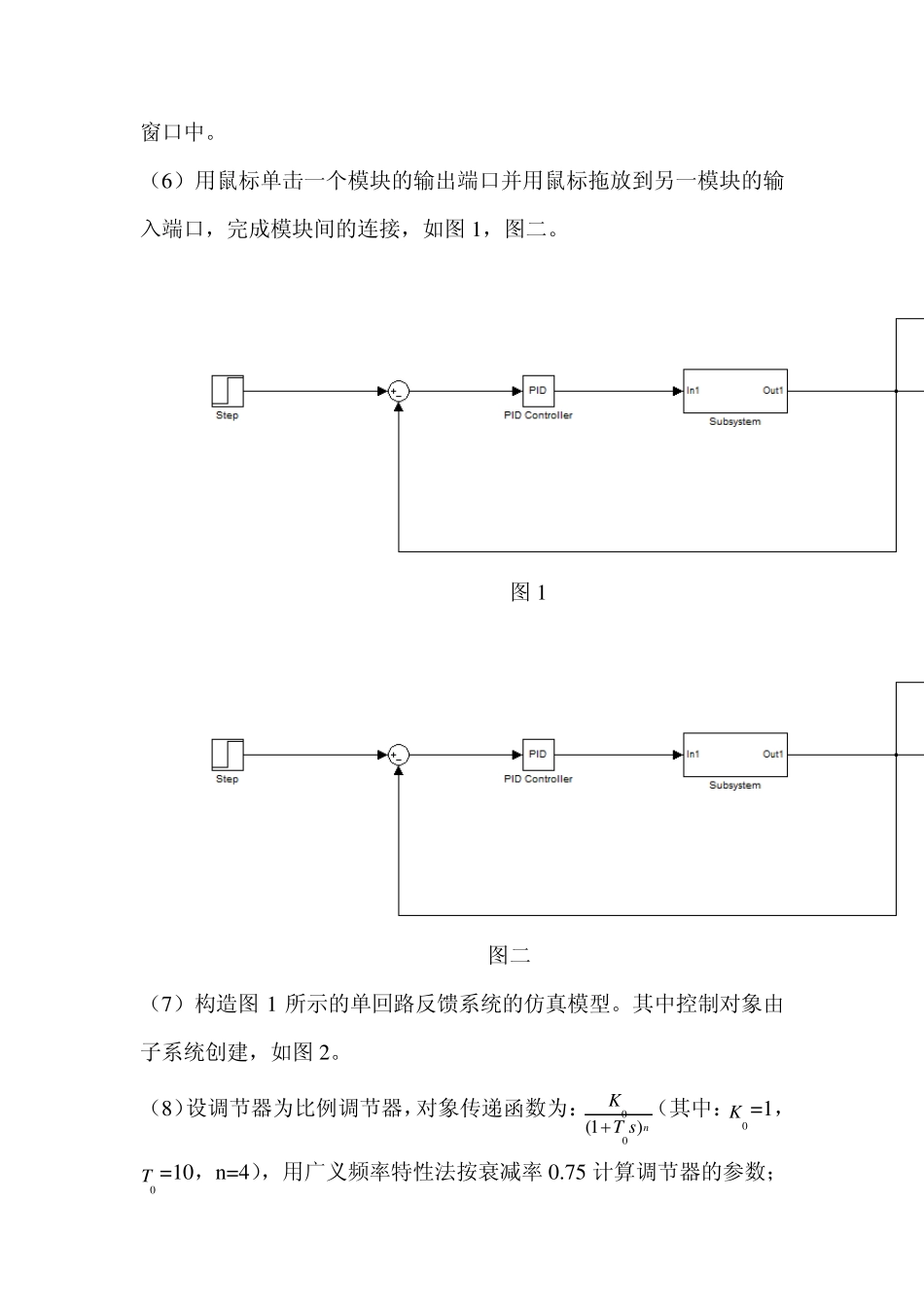
(6)用鼠标单击一个模块的输出端口并用鼠标拖放到另一模块的输入端口,完成模块间的连接,如图 1,图二
图 1 图二 (7)构造图 1 所示的单回路反馈系统的仿真模型
其中控制对象由子系统创建,如图 2
(8)设调节器为比例调节器,对象传递函数为:00(1)nKT s(其中:0K =1,0T =10,n=4),用广义频率特性法按衰减率 0
75 计算调节器的参数;根据计算结果设置PID 调节其参数,启动仿真,通过示波器模块观测并记录系统输出的变化曲线