— 103 — 第五章 卡尔曼滤波器的应用 5
1 卡尔曼滤波器在INS中的构成方式 在 INS中,KF可以有两种最基本的构成方式:(1)开环系统;(2)闭环系统,下面将分别叙述
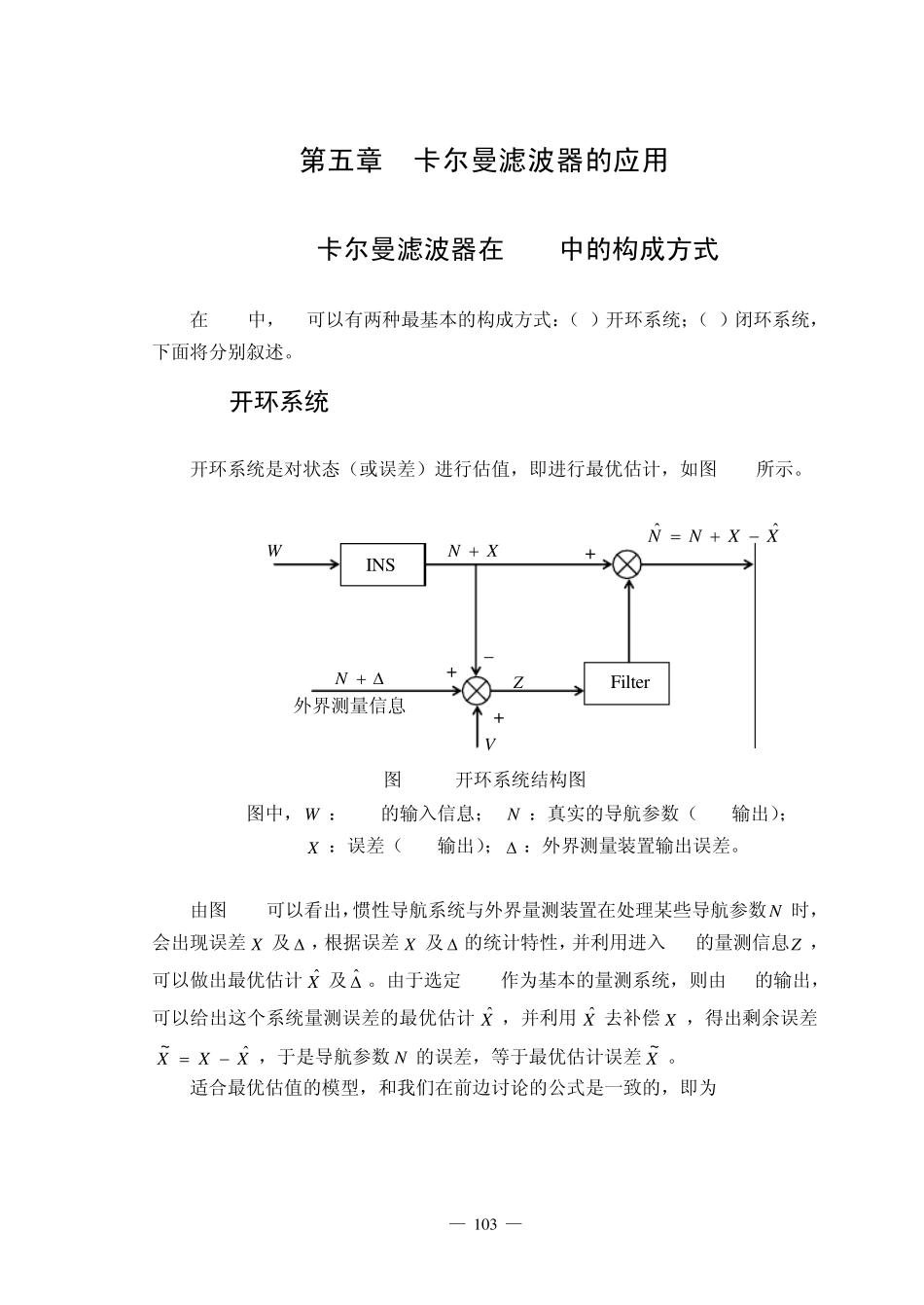
1 开环系统 开环系统是对状态(或误差)进行估值,即进行最优估计,如图 5-1所示
图 5-1 开环系统结构图 图中,W :INS的输入信息; N :真实的导航参数(INS输出); X :误差(INS输出); :外界测量装置输出误差
由图 5-1可以看出,惯性导航系统与外界量测装置在处理某些导航参数N 时,会出现误差 X 及 ,根据误差 X 及 的统计特性,并利用进入 KF的量测信息Z ,可以做出最优估计 Xˆ 及 ˆ
由于选定 INS作为基本的量测系统,则由 KF的输出,可以给出这个系统量测误差的最优估计 Xˆ ,并利用 Xˆ 去补偿 X ,得出剩余误差XXXˆ~,于是导航参数 N 的误差,等于最优估计误差 X~
适合最优估值的模型,和我们在前边讨论的公式是一致的,即为 INS Filter W XN XXNNˆˆ N Z V _ + + + 外界测量信息 — 104 — kkkkkkVHXZWAXX11 (5-1) 有 kkkkkkkkkkkkkkkkkkKVWKHIXKHIAXHAVWAXHKXAWAXXHZKXWAXXXX1111111111~ˆˆˆˆˆ~ (5-2) 式(5-2)说明,动态系统是按 KF之后所构成的开环系统最优估计误差kX~的动态特性,一定要注意,要使kXˆ去补偿kX
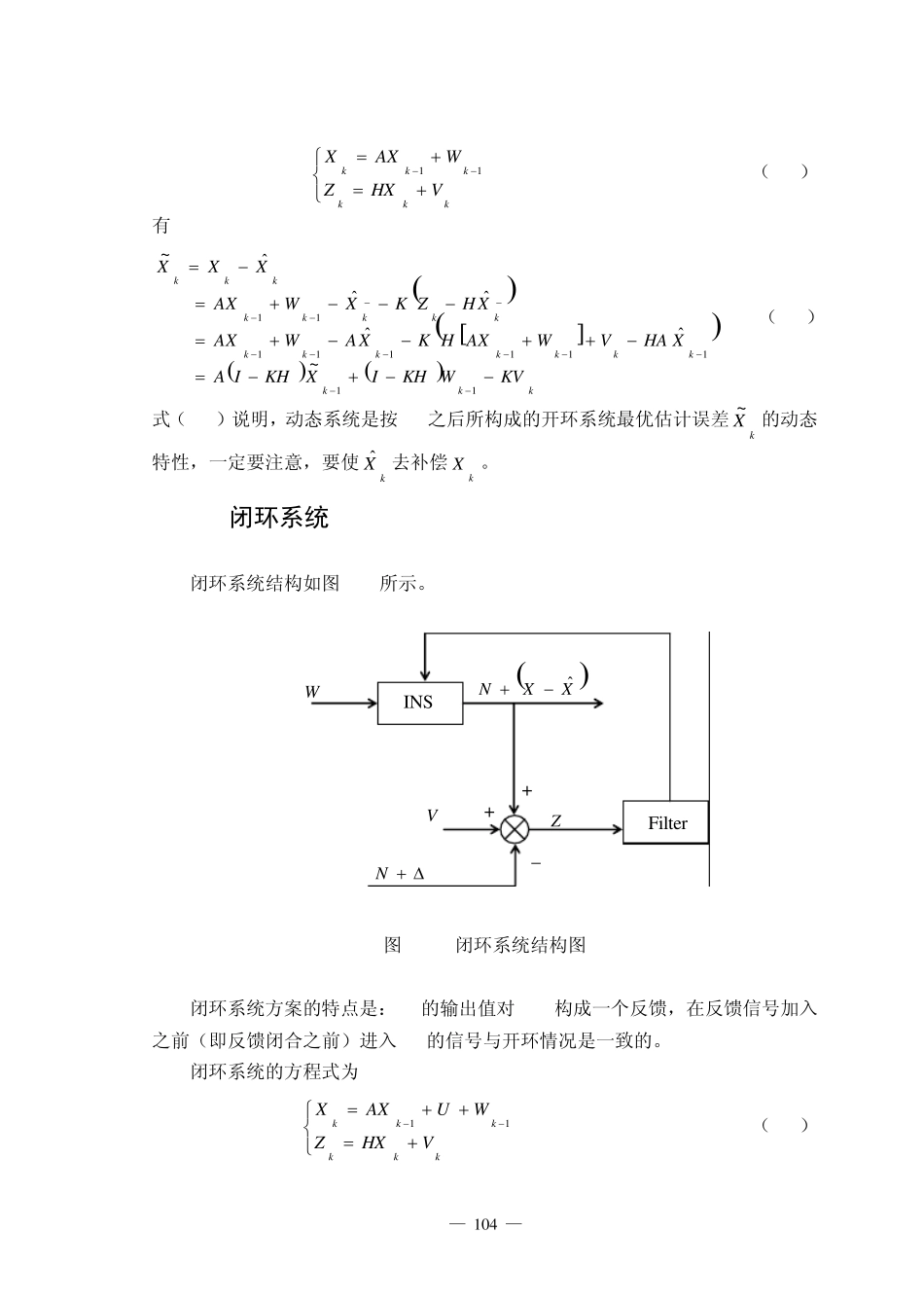
2 闭环系统 闭环系统结构如图 5-2所示
图 5-2 闭环系统结构图 闭环系统方案的特点是:KF的输出值对 INS构成一个反馈,在反馈信号加入