精品文档---下载后可任意编辑 电气控制技术课程设计说明书 机械手臂搬运加工流程控制 学生姓名: 专 业: 电气工程及其自动化 班 级: 学 号: 指导老师职称 完成时间:精品文档---下载后可任意编辑湖南工学院电气控制技术课程设计课题任务书学院:电气与信息工程学院 专业:电气工程及其自动化 指导老师学生姓名易俊课题名称机械手臂搬运加工流程控制内容及任务一、目标: 设计一个基于 PLC 的机械手臂搬运控制系统
二、任务:根据控制要求,明确设计任务,拟定设计方案与进度计划,运用所学的理论知识,进行机械手臂搬运加工流程运行原理设计、硬件系统设计、软件系统设计、创新设计,提高理论知识工程应用能力、系统调试能力、分析问题与解决问题的能力
主要内容包括:1
设计出硬件系统的结构图、接线图、时序图等;2
系统有启动、停止功能;3
运用功能指令进行 PLC 控制程序设计,并有主程序、子程序和中断程序;4
程序结构与控制功能自行创新设计;5
进行系统调试,实现机械手臂搬运加工流程的控制要求
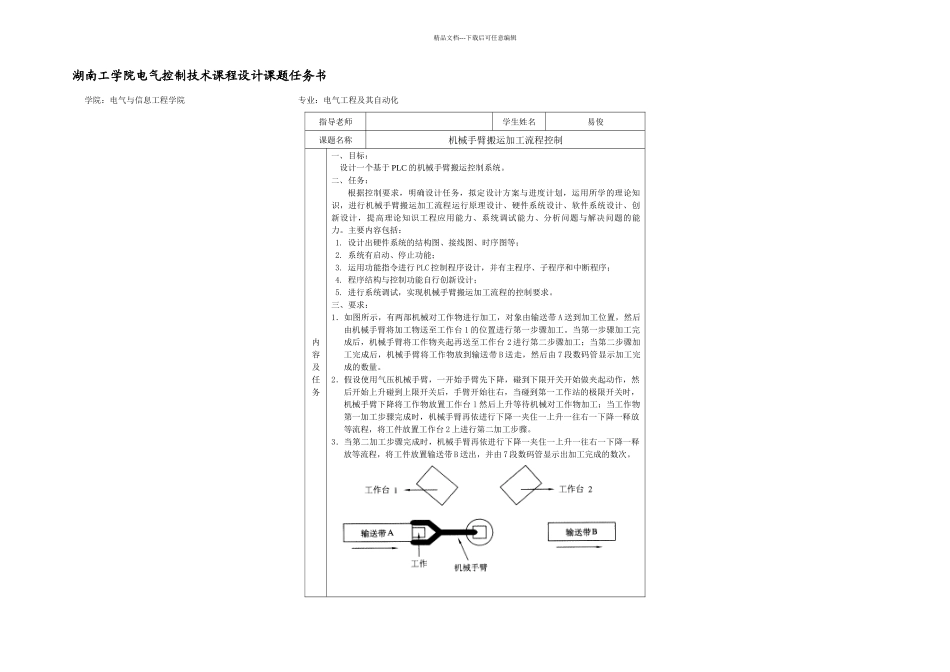
三、要求:1.如图所示,有两部机械对工作物进行加工,对象由输送带 A 送到加工位置,然后由机械手臂将加工物送至工作台 1 的位置进行第一步骤加工
当第一步骤加工完成后,机械手臂将工作物夹起再送至工作台 2 进行第二步骤加工;当第二步骤加工完成后,机械手臂将工作物放到输送带 B 送走,然后由 7 段数码管显示加工完成的数量
2.假设使用气压机械手臂,一开始手臂先下降,碰到下限开关开始做夹起动作,然后开始上升碰到上限开关后,手臂开始往右,当碰到第一工作站的极限开关时,机械手臂下降将工作物放置工作台 l 然后上升等待机械对工作物加工;当工作物第一加工步骤完成时,机械手臂再依进行下降一夹住一上升一往右一下降一释放等流程,将工件放置工作台 2 上进行第二加工步骤
3.当第二加工步骤完成时,机械手臂再依进