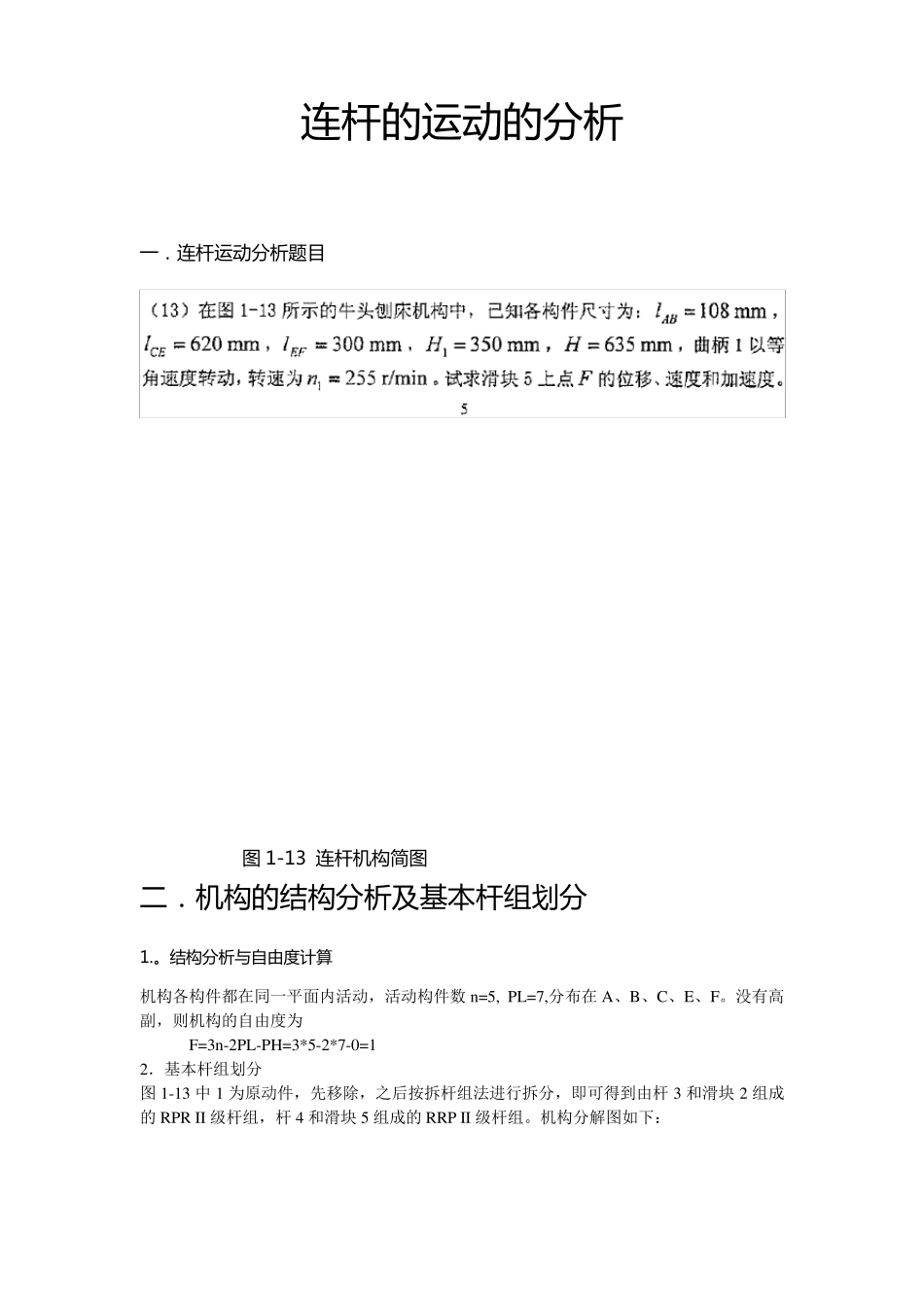
连 杆 的 运 动 的 分 析 一 . 连 杆 运 动 分 析 题 目 图 1-13 连 杆 机 构 简 图 二 . 机 构 的 结 构 分 析 及 基 本 杆 组 划 分 1
结 构 分 析 与自由度计算 机构各构件都在同一平面内活动,活动构件数n=5, PL=7,分布在A、B、C、E、F
没有高副,则机构的自由度为 F=3n-2PL-PH=3*5-2*7-0=1 2.基本杆组划分 图 1-13 中 1 为原动件,先移除,之后按拆杆组法进行拆分,即可得到由杆 3 和滑块 2 组成的 RPR II 级杆组,杆 4 和滑块 5 组成的 RRP II 级杆组
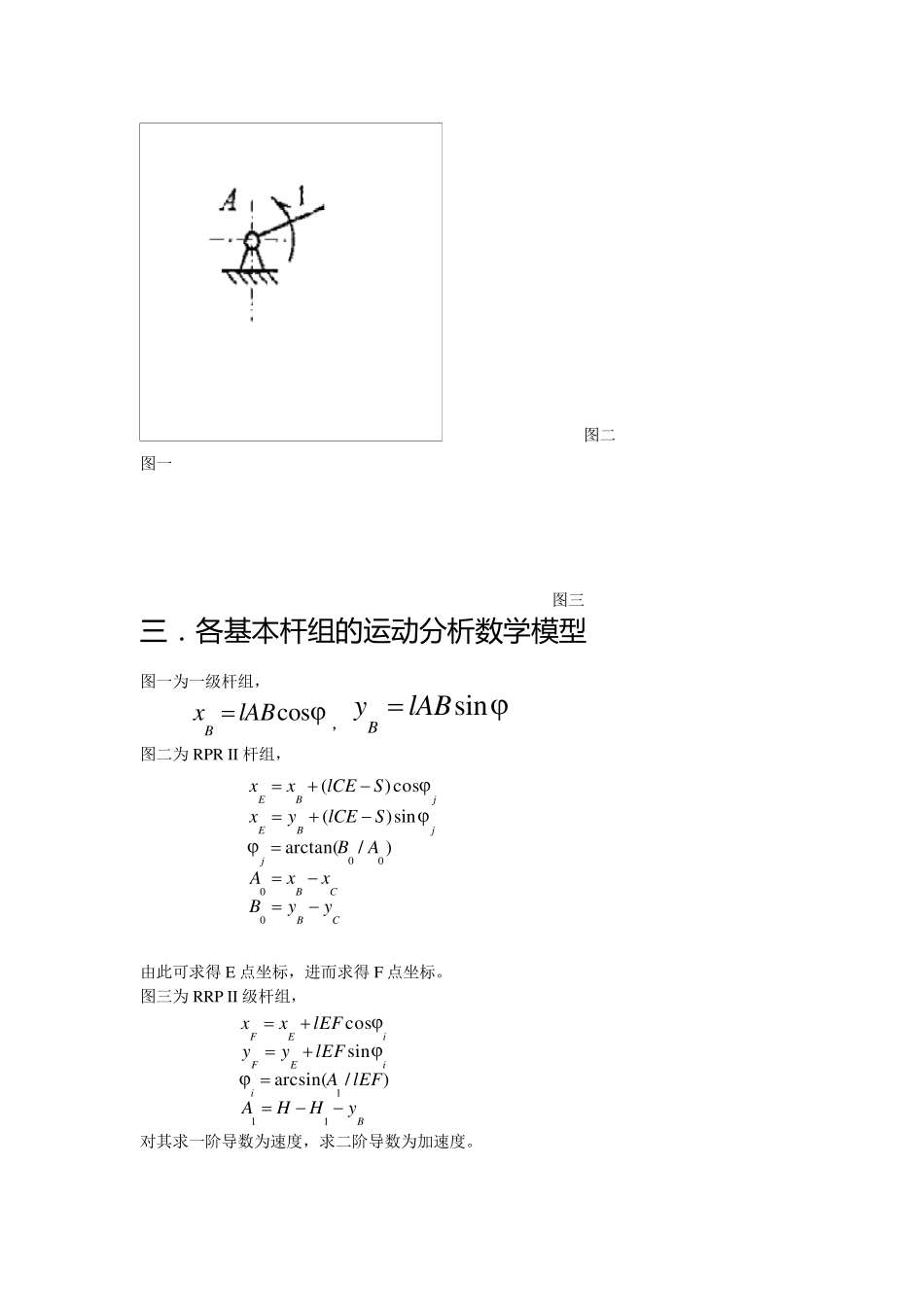
机构分解图如下: 图二 图一 图三 三.各基本杆组的运动分析数学模型 图一为一级杆组, coslABxB ,sinlAByB 图二为RPR II 杆组, CBCBjjBEjBEyyBxxAABSlCEyxSlCExx0000)/arctan(sin)(cos)( 由此可求得E 点坐标,进而求得F 点坐标
图三为RRP II 级杆组, BiiEFiEFyHHAlEFAlEFyylEFxx111)/arcsin(sincos 对其求一阶导数为速度,求二阶导数为加速度
lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0; yC=-350; A0=xB-xC; B0=yB-yC; S=sqrt(A0
^2); zj=atan(B0/A0); xE=xB+(lCE-S)*cos(zj); yE=yB+(lCE-S)*sin(zj); a=0:0
0001:20/255; Xe=subs(xE,t