精品文档---下载后可任意编辑1、设计背景:由于城市道路绿化带以及小区绿化带台阶高度没有统一标准,这造成了喷涂机的工作高度有一定的限制
2、机构概要:考虑到城市道路绿化带台阶的高度带来的不确定性,同时为了扩大喷涂机的应用范围和通用性,我们在喷涂机上设计了一个小型升降平台
在升降平台中,常采纳多级 X 形的剪式机构
X 形剪式机构是一种单自由度机构,在实践中得到广泛的应用,如玩具、灯具、登高作业台、起重平台等,一般是利用它的对称结构具有放大的平行位移的特点
在相同的起升高度下,X 形剪式机构具有较小的纵向尺寸(L1 和 L2)和较小的纵向尺寸变动幅度, 以及较大的位移放大率, 见下图
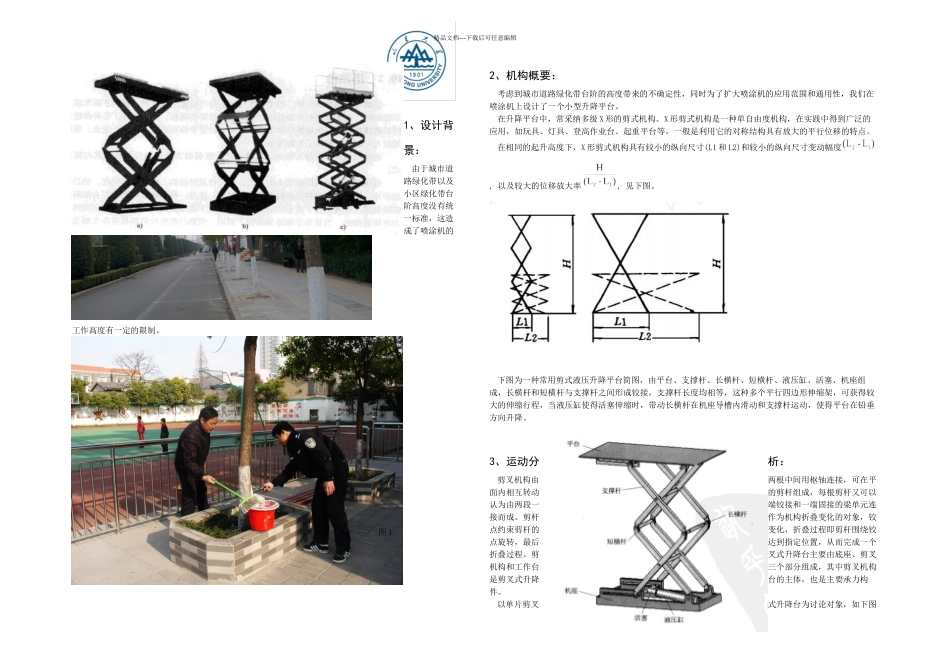
下图为一种常用剪式液压升降平台简图,由平台、支撑杆、长横杆、短横杆、液压缸、活塞、机座组成,长横杆和短横杆与支撑杆之间形成铰接,支撑杆长度均相等,这种多个平行四边形伸缩架,可获得较大的伸缩行程,当液压缸使得活塞伸缩时,带动长横杆在机座导槽内滑动和支撑杆运动,使得平台在铅垂方向升降
3、运动分析:剪叉机构由两根中间用枢轴连接,可在平面内相互转动的剪杆组成,每根剪杆又可以认为由两段一端铰接和一端固接的梁单元连接而成
剪杆作为机构折叠变化的对象,铰点约束剪杆的变化,折叠过程即剪杆围绕铰点旋转,最后达到指定位置,从而完成一个折叠过程
剪叉式升降台主要由底座、剪叉机构和工作台三个部分组成,其中剪叉机构是剪叉式升降台的主体,也是主要承力构件
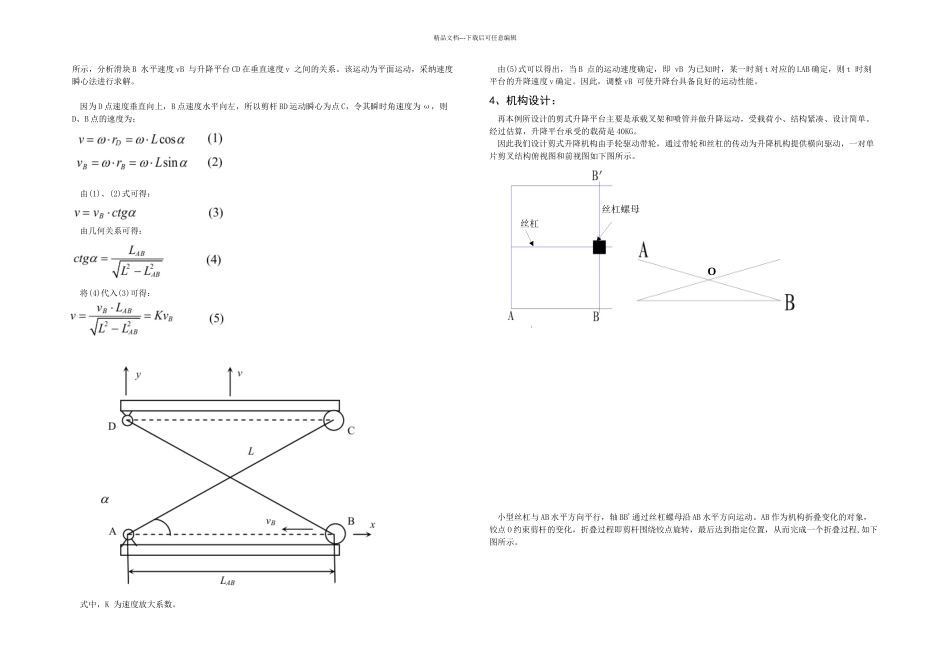
以单片剪叉式升降台为讨论对象,如下图图 1O精品文档---下载后可任意编辑所示,分析滑块 B 水平速度 vB 与升降平台 CD 在垂直速度 v 之间的关系
该运动为平面运动,采纳速度瞬心法进行求解
因为 D 点速度垂直向上,B 点速度水平向左,所以剪杆 BD 运动瞬心为点 C,令其瞬时角速度为 ω,则D、B 点的速度为:由(1)、(2)式可得:由几何关系可得: 将(4