精品文档---下载后可任意编辑冯立威摘要当几个传感器在一块特定区域上执行监视时,一种包含了基于传感器的滤波算法,局部处理器和全局处理器的集成方法被用来描述分布式融合问题
对于传感器追踪系统,在直角坐标系中采纳的每一种滤波算法被提出用于目标追踪,使用球面坐标系(SCS)中的雷达测量范围,方位和仰角这些参数
对于局部处理器,每一种航迹融合算法用来合并代表相同目标的两条航迹
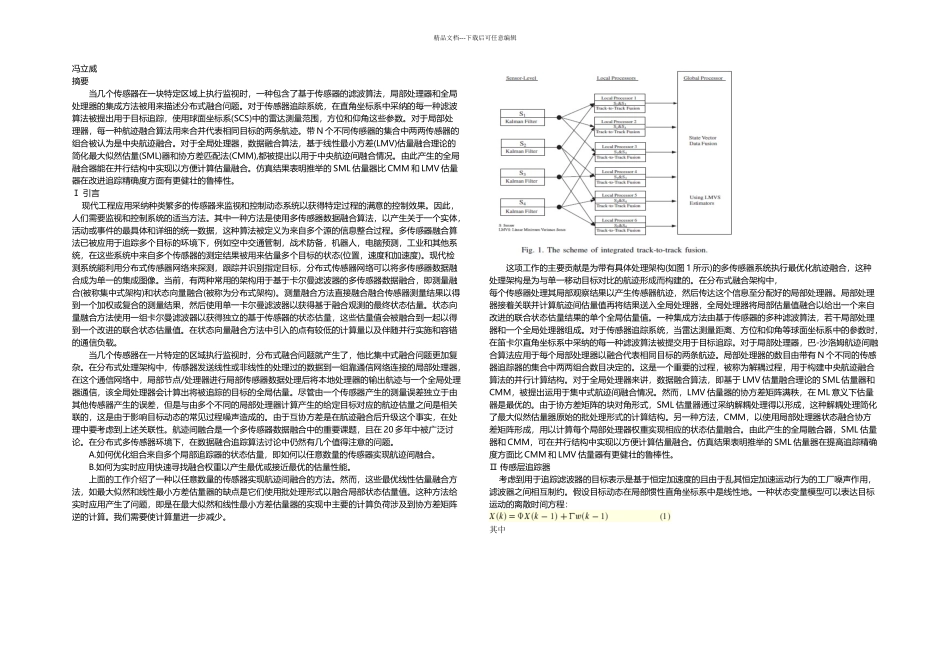
带 N 个不同传感器的集合中两两传感器的组合被认为是中央航迹融合
对于全局处理器,数据融合算法,基于线性最小方差(LMV)估量融合理论的简化最大似然估量(SML)器和协方差匹配法(CMM),都被提出以用于中央航迹间融合情况
由此产生的全局融合器能在并行结构中实现以方便计算估量融合
仿真结果表明推举的 SML 估量器比 CMM 和 LMV 估量器在改进追踪精确度方面有更健壮的鲁棒性
Ⅰ 引言 现代工程应用采纳种类繁多的传感器来监视和控制动态系统以获得特定过程的满意的控制效果
因此,人们需要监视和控制系统的适当方法
其中一种方法是使用多传感器数据融合算法,以产生关于一个实体,活动或事件的最具体和详细的统一数据,这种算法被定义为来自多个源的信息整合过程
多传感器融合算法已被应用于追踪多个目标的环境下,例如空中交通管制,战术防备,机器人,电脑预测,工业和其他系统,在这些系统中来自多个传感器的测定结果被用来估量多个目标的状态(位置,速度和加速度)
现代检测系统能利用分布式传感器网络来探测,跟踪并识别指定目标,分布式传感器网络可以将多传感器数据融合成为单一的集成图像
当前,有两种常用的架构用于基于卡尔曼滤波器的多传感器数据融合,即测量融合(被称集中式架构)和状态向量融合(被称为分布式架构)
测量融合方法直接融合融合传感器测量结果以得到一个加权或复合的测量结果,然后使用单一卡尔曼滤波器以获得基于融合观测的最终状态估量