精品文档---下载后可任意编辑姓名:刘志浩指导老师: 胡立坤成绩:学院:电气工程学院专业:自动化班级:132实验内容:基于频域的串联校正控制器设计2024 年 6 月 15 日其他组员:鲁巍和刘志浩设计了 MATLAB 仿真并一起调试了动手实验夏超设计了电路图并在 multism 中做了仿真刘志浩通过和鲁巍,夏超讨论对实验结果进行了分析,撰写了实验报告【实验时间】2024 年 6 月 15 日【实验地点】广西大学综合楼 8081
学会采纳 MATLAB 进行串联超前、滞后和滞后、超前校正控制器的设计2
掌握采纳有缘放大器模拟电路实现串联超前、滞后和滞后、超前校正的方法【实验设备与软件】【实验原理】1、被模拟对象模型的描述 控制函数:;为传动系数,为机电时间常数
2、基于串联超前或串联滞后或滞后—超前校正的闭环控制 系统的串联校正方法主要是通过在前向通路上增加校正装置实现保证系统稳定基础上提高系统的暂态性能
从频率的角度,就是通过校正装置改变原系统的频率特性,包过幅频特性和相频特性,从而达到所要求的性能指标
串联校正闭环控制框图如下
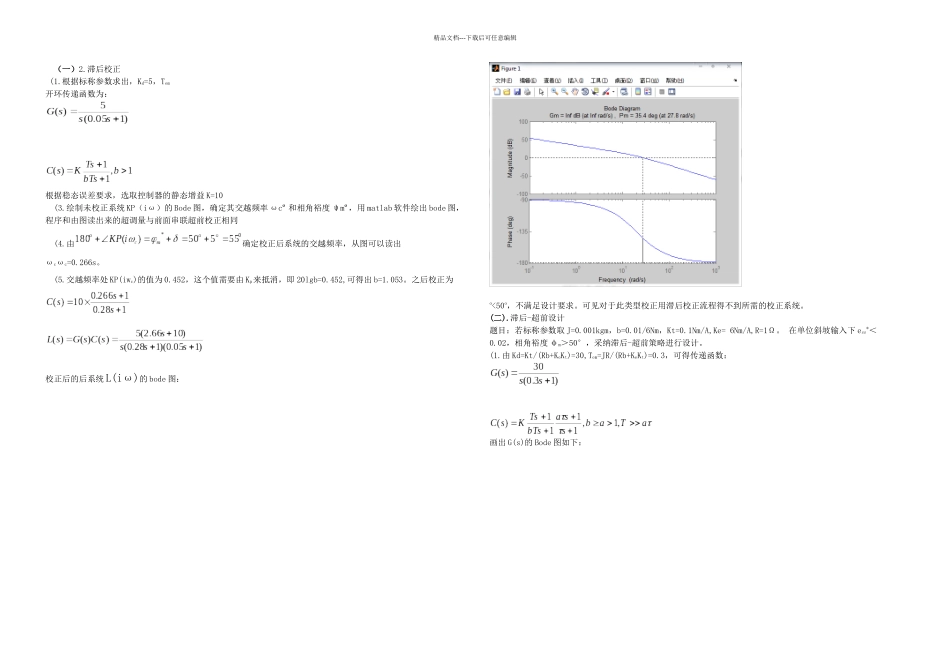
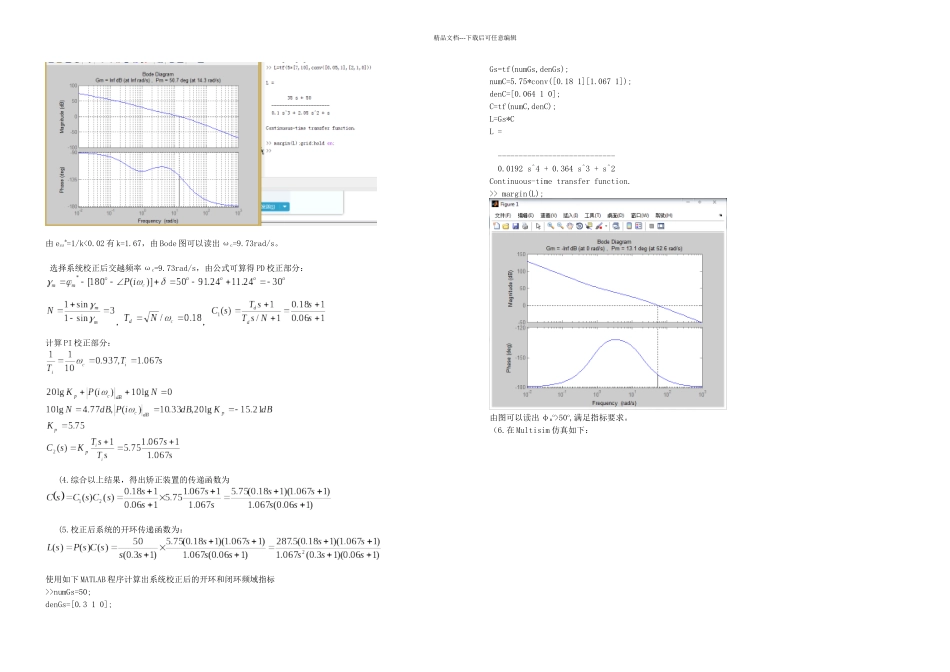
串联校正装置有无源和有源之分,均可设计成串联超前或串联滞后或者滞后—超前校正方式
校正的基本形式是式中,K 和 a、b 是两类可变参数
b=1,a>1 表示相位超前;a=1,b>1 表示相位滞后
K 用于系统校正后的静态增益,以满足稳态性能指标和扰动抑制性能
K 的选择取决于抚恤的稳态误差,减小稳态误差就必须增大比列系数,但并不是比例系数越大越好
【实验内容、方法、过程与分析】动手实验与分析:用有源放大模拟电路模拟永磁他励电枢控制式直流电机机对象,采纳基于 Bode 图的频率设计方法对以下三种参数的性能指标设计串联校正控制器
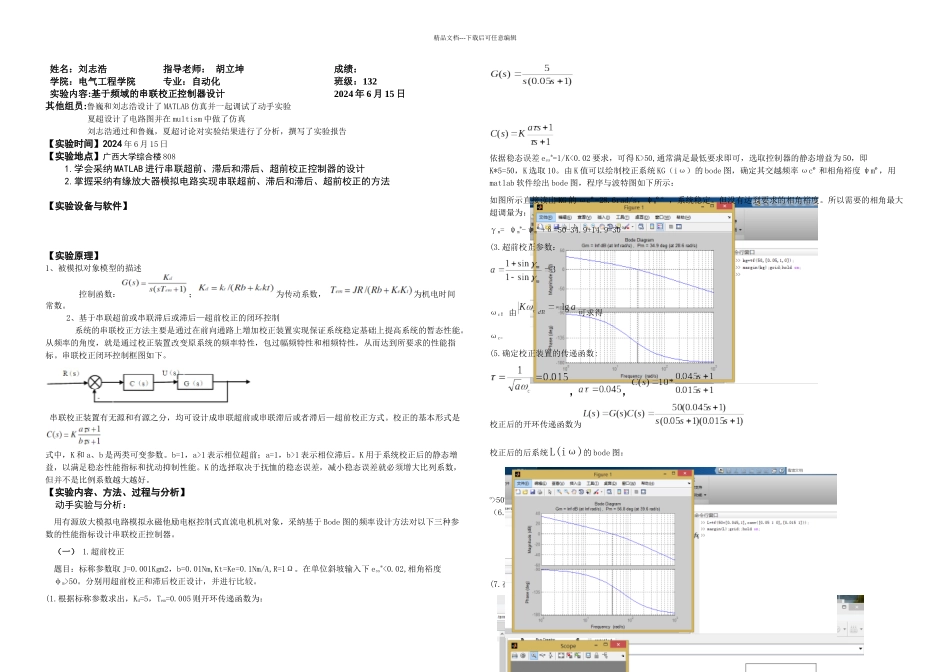
超前校正题目:标称参数取 J=0
001Kgm2,b=0
01Nm,Kt=Ke=0
1Nm/A,R=1Ω