精品文档---下载后可任意编辑第一章 上位机遥控箱介绍 3 面板介绍 1 界面介绍 2 第二章 排爆机器人操作说明 2 监视及显示查看 2 指示灯显示 2 视频显示 3 报警错误消息提示 3 设置的速度显示 3 各轴位置及使能情况显示 4 机械臂末端速度显示 5 初始化与清错操作 5 上下使能操作 5 模式切换操作 5 暂停、急停及复位操作 6 机器人运动全局速度设置 6 车体运动操作 7 单轴运动操作 7 车体行进转向操作 7 摆臂运动操作 7 单轴运动操作 7 分组控制操作 7 耦合控制操作 8 机械臂运动操作 8 机械臂点动操作 8 末端平动控制 8 第三章 日常故障及处理 8 网络通讯故障 8 电压不足 9 第四章 技术参数 8 8 第一章 上位机遥控箱介绍一
1 面板介绍总电源开关:通过该开关控制排爆箱总电源的开和关
电脑启动按钮:通过该按钮来启动和关闭排爆箱电脑
有线无线开关:通过该开关来切换排爆机器人为有线或无线控制方式
紧停旋钮:通过选择紧停按钮来停止和恢复下位机运行
精品文档---下载后可任意编辑手控制摇杆:控制机械臂手末端运动
车控制摇杆:控制车体行进转向
2 界面介绍清错、配置及模式切换区域:进行异常处理、机器人上下使能、机器人暂停、急停及复位和模式切换
视频切换区域:进行视频显示控制
云台控制区域:进行云台运动控制
报警错误及消息提示区域:实时显示下位机当前错误信息
指示灯区域:显示网络通讯、使能、错误和抱闸状态信息
机器人模型显示区域:通过机器人模型实时显示机器人摆臂及机械臂位置
全局速度设置区域:设置机器人运动的速度百分比
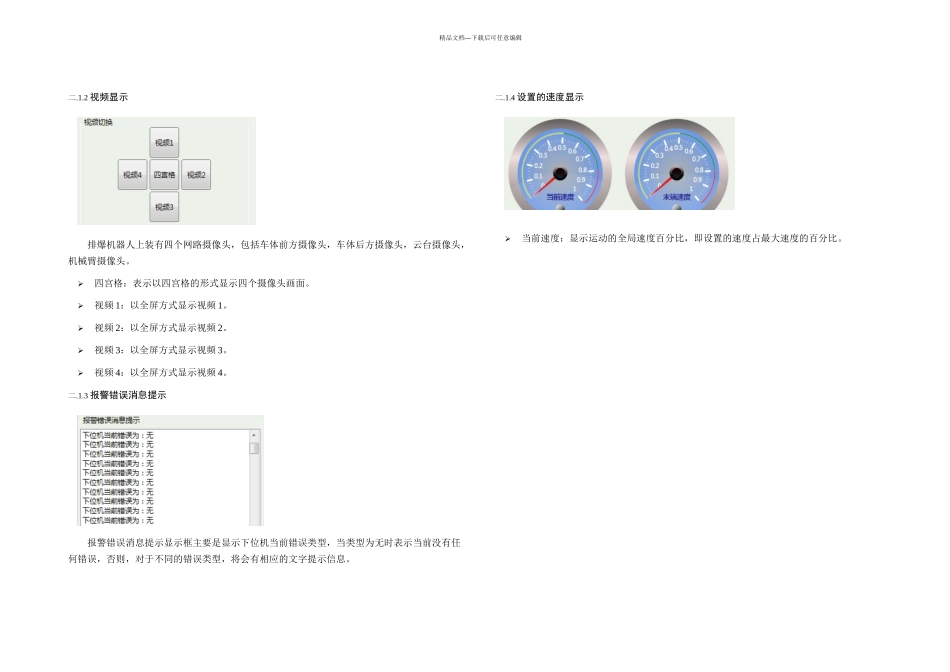
当前速度及末端速度显示区域:显示设置的机器人运动的速度百分比
车点动、手点动及摆臂控制区域:控制车点动、手点动及摆臂点动、分组控制及耦合控制
车、摆臂、机械臂各轴位置和使能显示区域:显示车、