精品文档---下载后可任意编辑本次教程是我使用 ZSAM 的 5 号跑道做的一个实例
没有涉及到灯光问题
滑上跑道,对准中线,放襟翼到 5 度或 10 度
设置 MCP 面板,原来 Speed 应该设置 V2,因为是默认机
我就设置了190
航向设置当前跑道航向我这里设置了 056 度,高度因为是做本场 5 边所以我设置了 3000ft
(3000 本人认为是捕捉 ILS 信号的最佳高度)2 准备完毕后,油门推到 N1,或者直接推到 100%
默认机不会在跑道上就过载放心
3 标准 VR 拉杆,V2 抬头
因为默认机没有 V1,VR,V2
我们就大概在 150 拉杆,160 左右就抬头了
注意起飞后保持仰角在,10-15 度之间,否则会发生擦尾
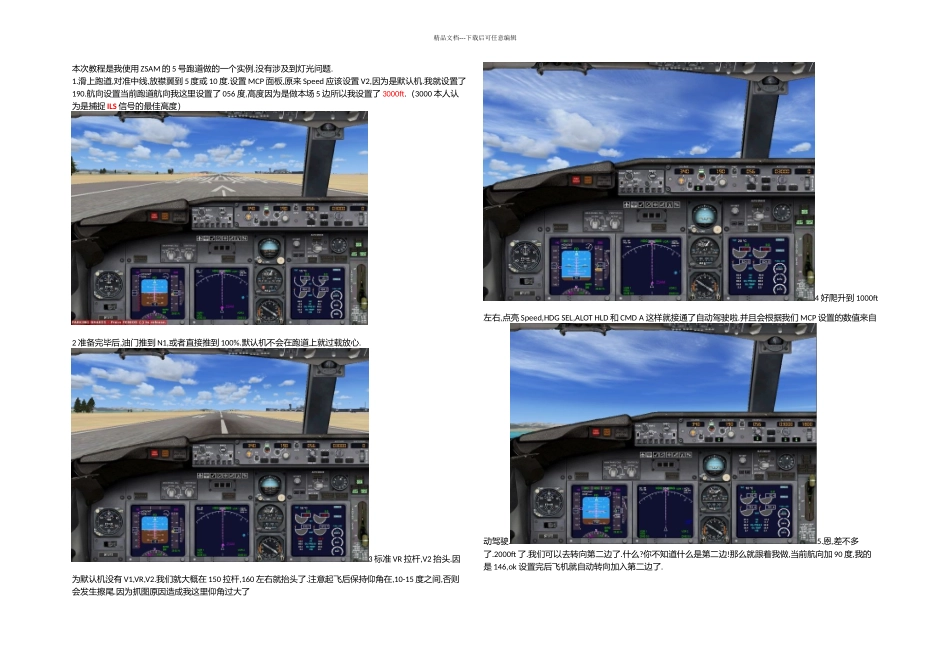
因为抓图原因造成我这里仰角过大了4 好爬升到 1000ft左右,点亮 Speed,HDG SEL,ALOT HLD 和 CMD A 这样就接通了自动驾驶啦
并且会根据我们 MCP 设置的数值来自动驾驶
恩,差不多了
2000ft 了
我们可以去转向第二边了
你不知道什么是第二边
那么就跟着我做,当前航向加 90 度,我的是 146,ok 设置完后飞机就自动转向加入第二边了
精品文档---下载后可任意编辑6
有很多老鸟,都是 2 分钟的第二边
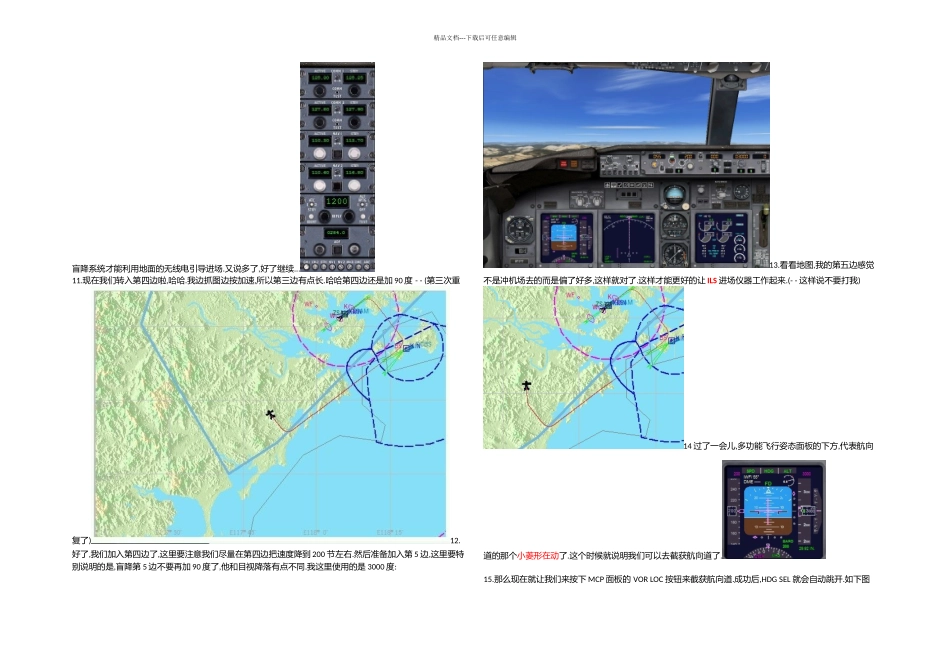
我这里是以一个 XLN 的导航点为准的,看我的 ND 显示器,快到 XLN 的时候,我航向加 90 度,236 度,加入第三边
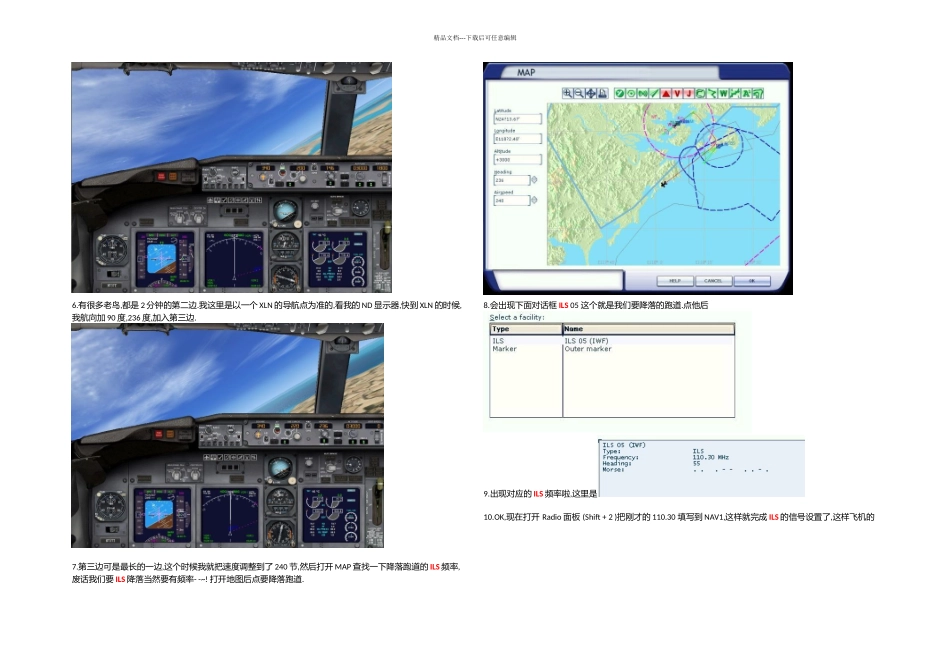
第三边可是最长的一边,这个时候我就把速度调整到了 240 节,然后打开 MAP 查找一下降落跑道的 ILS 频率,废话我们要 ILS 降落当然要有频率- -~
打开地图后点要降落跑道
会出现下面对话框 ILS 05 这个就是我们要降落的跑道
出现对应的 ILS 频率啦,这里是10
OK,现在打开 Radio 面板 (Shift + 2