设 计 报 告 课程:机器人工程 设计名称:智能循迹小车 小组成员: 学号: 专业: 机械电子工程 日期: 2012/2/5 指导老师: 成绩: 智能小车设计 1 1
任务及要求 1
1任务 设计一个基于直流电机的自动寻迹小车,使小车能够自动检测地面黑色轨迹,并沿着黑色车轨迹行驶
系统方案方框图如图1-1所示
图1-1 系统方案方框图 2
系统设计方案 2
1小车循迹原理 这里的循迹是指小车在白色地板上循黑线行走,由于黑线和白色地板对光线的反射系数不同,可以根据接收到的反射光的强弱来判断“道路”
通常采取的方法是红外探测法
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光
单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线
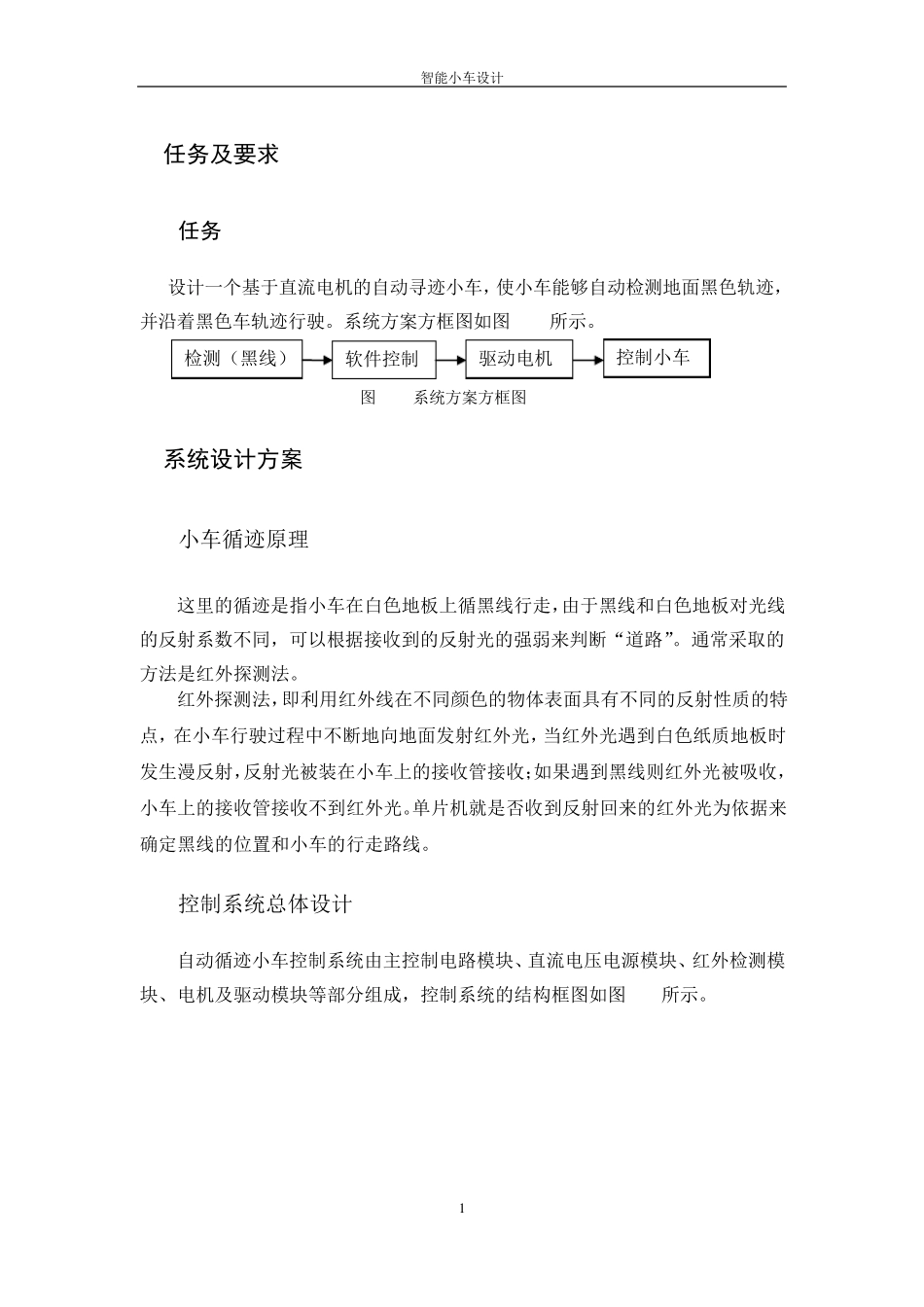
2控制系统总体设计 自动循迹小车控制系统由主控制电路模块、直流电压电源模块、红外检测模块、电机及驱动模块等部分组成,控制系统的结构框图如图2-1 所示
检测(黑线) 驱动电机 软件控制 控制小车 智能小车设计 2 主控制电路模块:用STC89C52 单片机、复位电路,时钟电路 其他模块见表 2-1所示
表 2-1 其他模块构成 电机及驱动模块 寻迹传感模块 电源模块 电机 驱动 红外发射/接受头 6V直流电 直流电机 LG9110 5号电池 两个 两个 两对 四个 3
系统方案 3
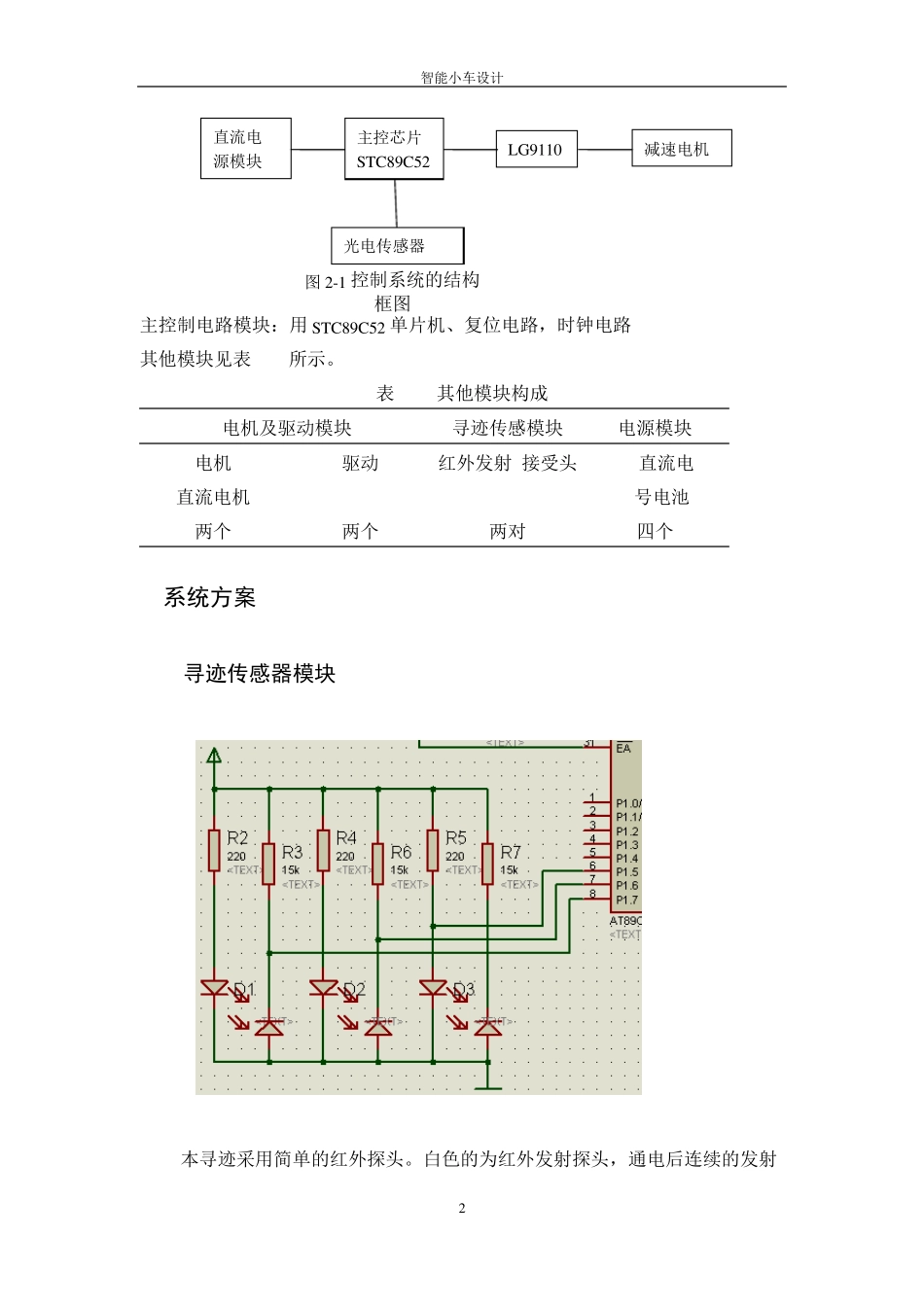
1 寻迹传感器模块 本寻迹采用简单的红外探头
白色的为红外发射探头,通电后连续的发射直流电 源模块 主控芯片 STC89C52 LG9110 减速电机 光电传感器 图 2-1 控制系统的结构框图智能小车设计 3 红外光线;黑色的为红外接收探头,接受反射回来的