机械原理大作业 课程名称: 机械原理 设计题目: 机械原理大作业 院 系: 汽车工程学院车辆工程 班 级: 1101201 姓 名:
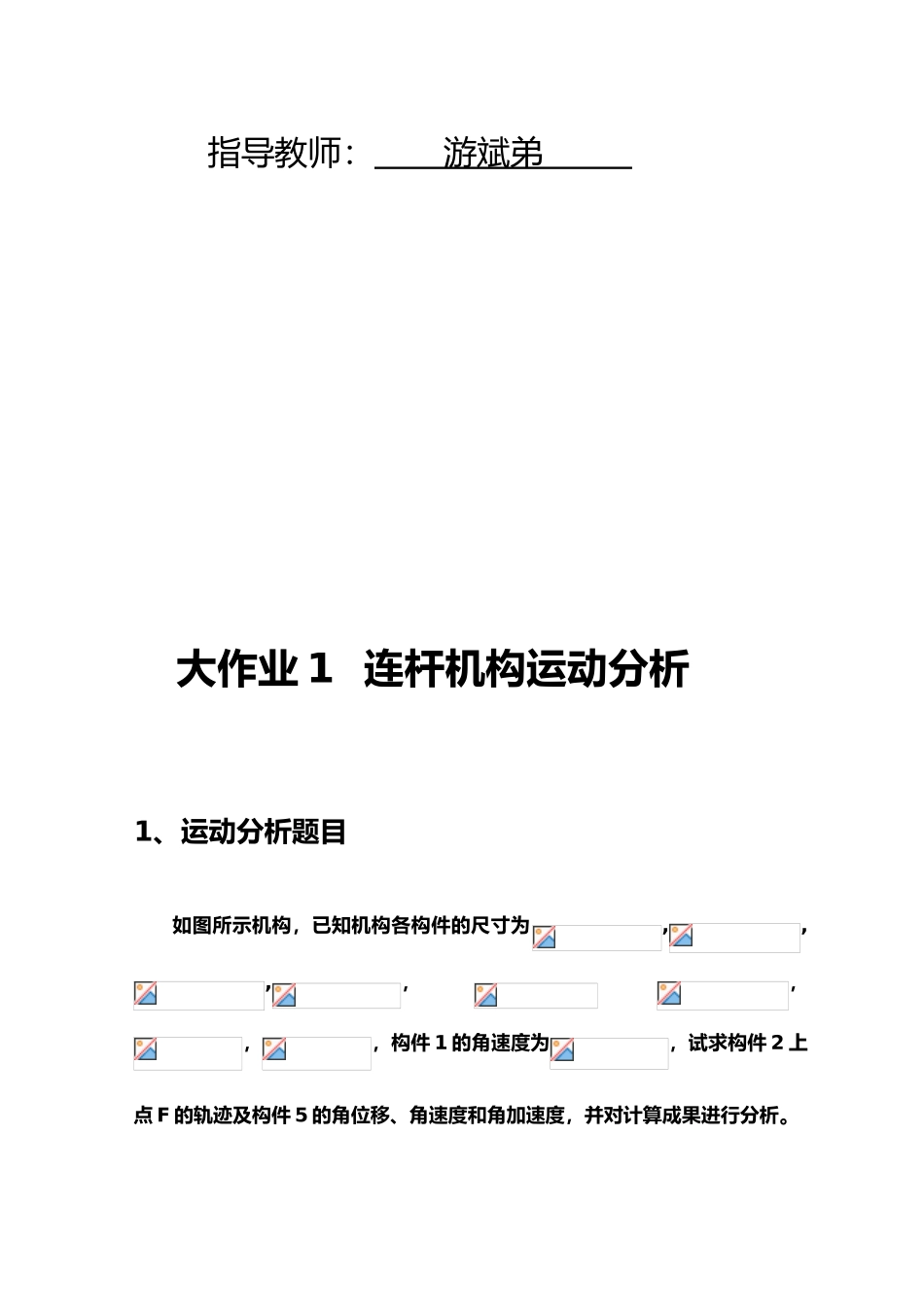
指导教师: 游斌弟 大作业 1 连杆机构运动分析1、运动分析题目如图所示机构,已知机构各构件的尺寸为,,,, ,,,构件 1 的角速度为,试求构件 2 上点 F 的轨迹及构件 5 的角位移、角速度和角加速度,并对计算成果进行分析
图 12、对机构进行构造分析该机构由 I 级杆组 RR(原动件 1)、II 级杆组 RRR(杆 2、杆 3)和 II级杆组 RPR(滑块 4 及杆 5)构成
I 级杆组 RR,如图 2 所示;II 级杆组RRR,如图 3 所示;II 级杆组 RPR,如图 4 所示
图 2 图 2 图 43、建立坐标系 建立以点 A 为原点的固定平面直角坐标系 4、各基本杆组运动分析的数学模型(1)同一构件上点的运动分析:如图 5 所示的构件 AB,,已知杆AB 的角速度,AB 杆长=280mm,可求得 B 点的位置、,速度、,加速度、
; ; 图 3; ;
图 4 (2)RRRII级杆组的运动分析如图 6 所示是由三个回转副和两个构件构成的II级组
已知两杆的杆长、和两个外运动副 B、D 的位置(、、、)、速度( ) 图 6 和加速度()
求内运动副 C 的位置()、速度()、加速度()以及两杆的角位置()、角速度()和角加速度()
1)位置方程为求解上式,应先求出或,将上式移相后分别平方相加,消去得式中: 其中,
为保证机构的装配,必须同步满足和解三角方程式可求得上式中,“ +”表达 B、C、D 三个运动副为顺时针排列;“—”表达B、C、D 为逆时针排列
将代入中可求得,而后即可求得2)速度方程将 式对 时 间 求 导 可 得 两 杆 的 角 速 度为式中: 内运动副 C 点的速度为3)加速