第三章 刚体运动学(Kinematics) 3
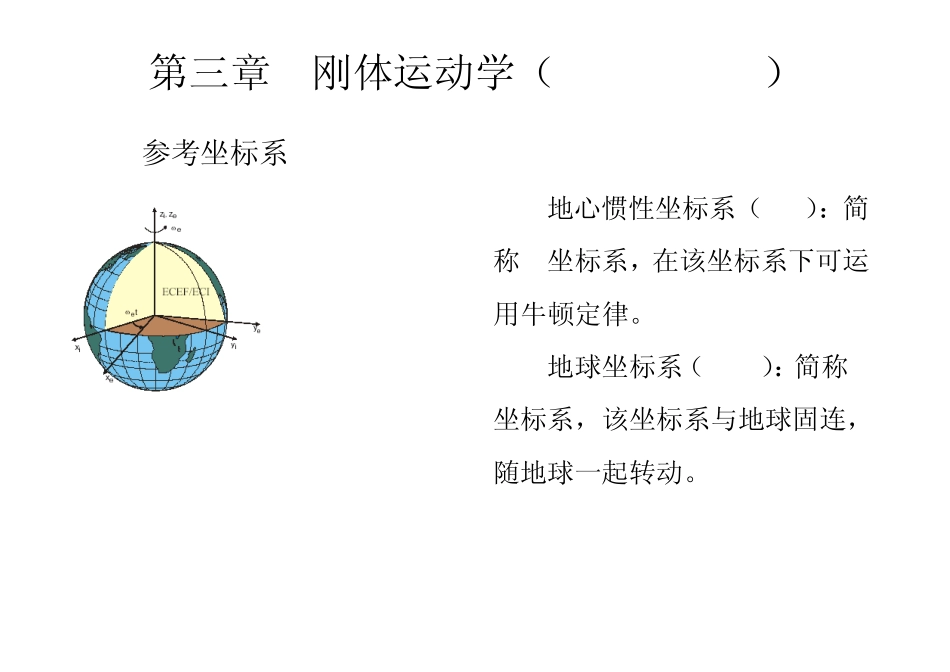
1 参考坐标系 地心惯性坐标系(ECI):简称i坐标系,在该坐标系下可运用牛顿定律
地球坐标系(ECEF):简称e坐标系,该坐标系与地球固连,随地球一起转动
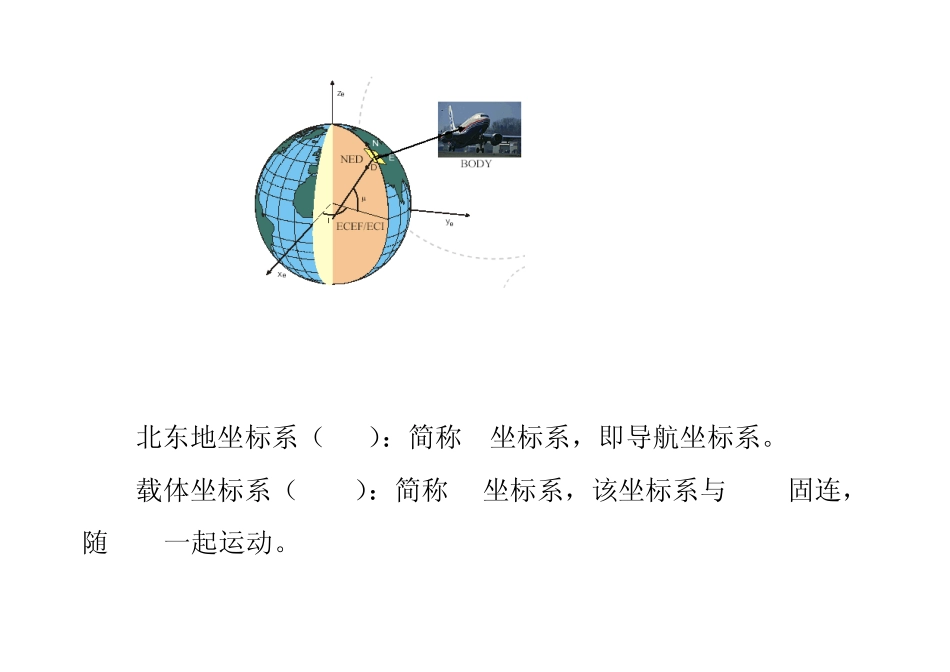
北东地坐标系(NED):简称n坐标系,即导航坐标系
载体坐标系(BODY):简称b坐标系,该坐标系与 AUV固连,随 AUV一起运动
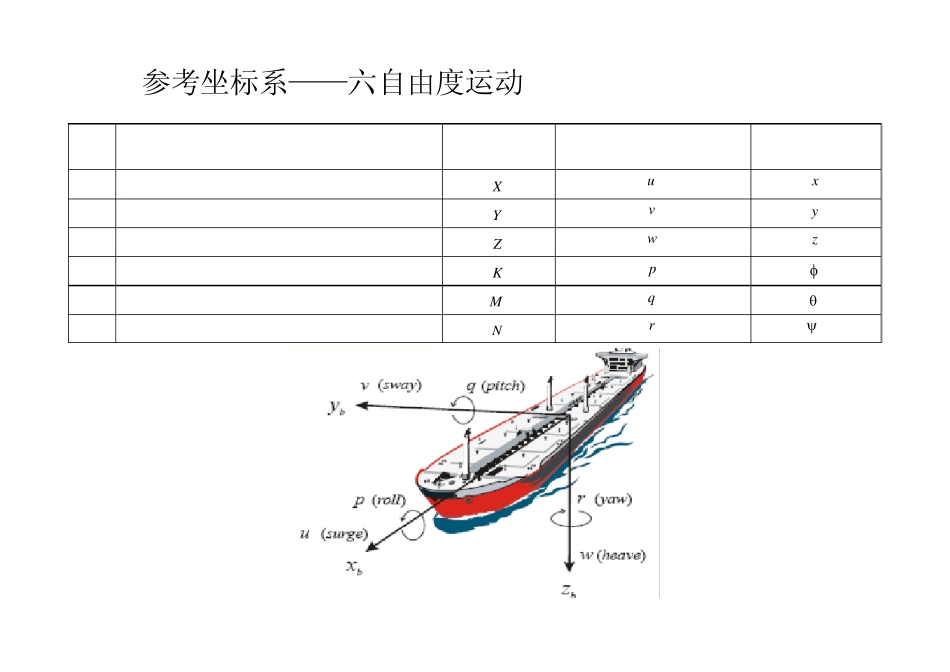
1 参考坐标系——六自由度运动 DOF forces and moments Linear and Angular velocities Positons and Euler angles 1 motion in the x-direction(surge) X u x 2 motion in the y-direction(sway) Y v y 3 motion in the x-direction(heave) Z w z 4 rotation about the x-axis(roll) K p 5 rotation about the y-axis(pitch) M q 6 rotation about the z-axis(yaw) N r 3
1 参考坐标系——符号 ECEF Longitude and position: latitude NED Attitude position: (Euler angles) Body-fixed Body-fixed Linear angular Velocity velocity 3expyz2lS 3nnped3S 3bouvvw3bnbpqr3
1 参考坐标系——符号 Body-fixed Body-