机电系统控制 ——控制理论综述及其发展方向 控制理论的综述及发展方向 1 控制理论的产生 控制理论作为一门学科,它的真正应用开始于工业革命时期,即 1788 年瓦特发明蒸汽机飞球调速器
该种采用机械式调节原理实现的蒸汽机速度自动控制是自动化应用的第一个里程碑
二次大战前,控制系统的设计因为缺乏系统的理论指导而多采用试凑法,二次大战期间,由于建造飞机自动驾驶仪、雷达跟踪系统、火炮瞄准系统等军事设备的需要,推动了控制理论的飞跃发展
1948 年美国数学家维纳总结了前人的成果,认为世界存在 3 大要素:物质、能量、信息,发表了著名的《控制论》,书中论述了控制理论的一般方法,推广了反馈的概念,从而基本上确立了控制理论这门学科[1]
2 控制理论的分类 控制理论的发展分为经典控制理论阶段、现代控制理论阶段及大系统智能控制理论阶段,下面将详细介绍各个控制理论的特点及优缺点[2]
1 经典控制理论 自动控制理论中建立在频率响应法和根轨迹法基础上的一个分支
经典控制理论的研究对象是单输入、单输出的自动控制系统,特别是线性定常系统
经典控制理论的特点是以输入输出特性(主要是传递函数)为系统数学模型,采用频率响应法和根轨迹法这些图解分析方法,分析系统性能和设计控制装置
经典控制理论的数学基础是拉普拉斯变换,占主导地位的分析和综合方法是频率域方法
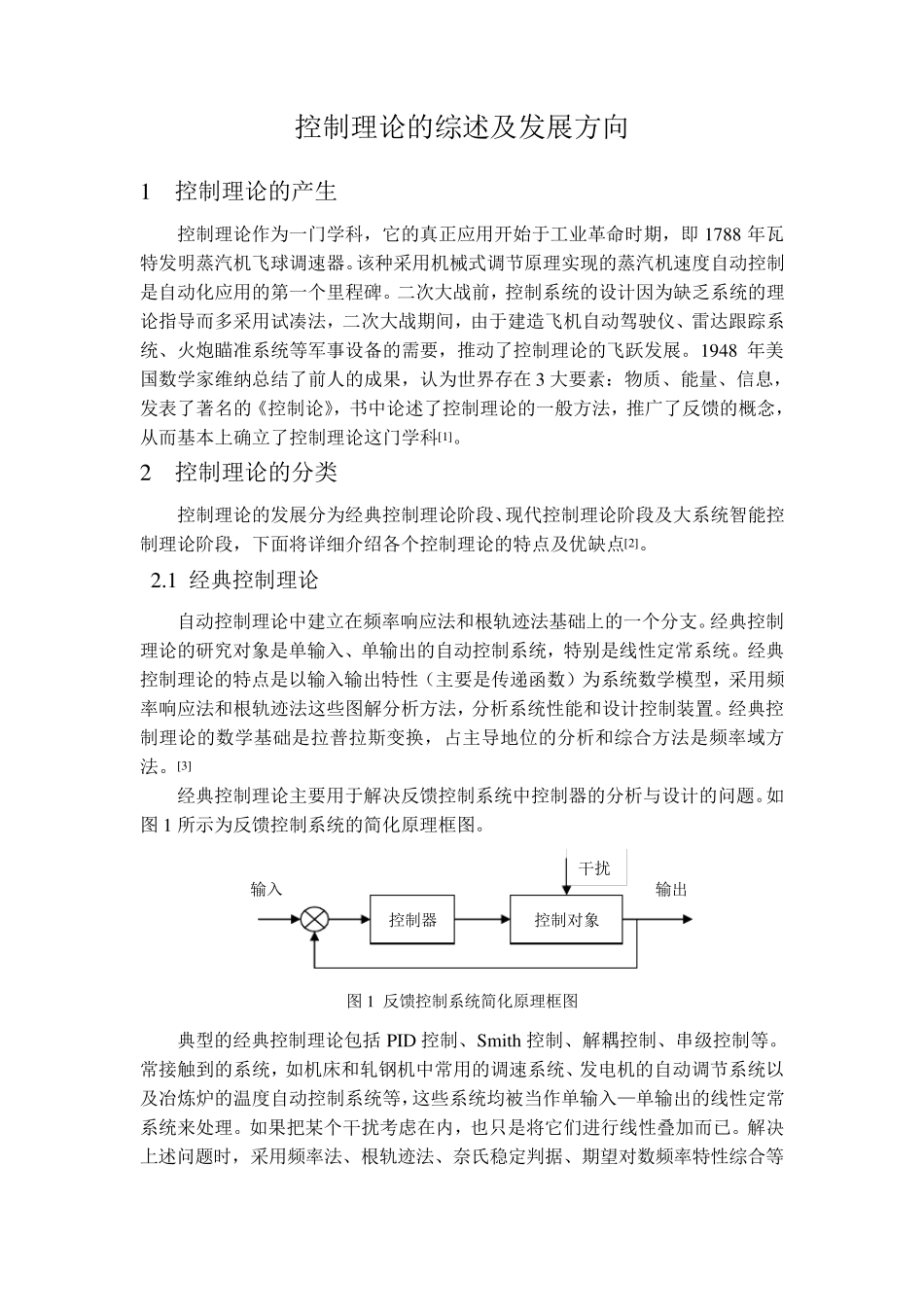
[3] 经典控制理论主要用于解决反馈控制系统中控制器的分析与设计的问题
如图1 所示为反馈控制系统的简化原理框图
图1 反馈控制系统简化原理框图 典型的经典控制理论包括PID 控制、Smith 控制、解耦控制、串级控制等
常接触到的系统,如机床和轧钢机中常用的调速系统、发电机的自动调节系统以及冶炼炉的温度自动控制系统等,这些系统均被当作单输入—单输出的线性定常系统来处理
如果把某个干扰考虑在内,也只是将它们进行线性叠加而已
解决上述问题时,采