哈尔滨理工大学 实验报告 控制系统仿真 专业: 自动化 1 2 -1 学号: ********** 姓名: 一.分析系统性能 课程名称 控制系统仿真 实验名称 分析系统性能 时间 8
29 地点 3# 姓名 蔡庆刚 学号 1230130101 班级 自动化12-1 一.实验目的及内容: 1
熟悉MATLAB 软件的操作过程; 2
熟悉闭环系统稳定性的判断方法; 3
熟悉闭环系统阶跃响应性能指标的求取
二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1
编写 MATLAB 程序代码; 2
在 MATLAT 中输入程序代码,运行程序; 3
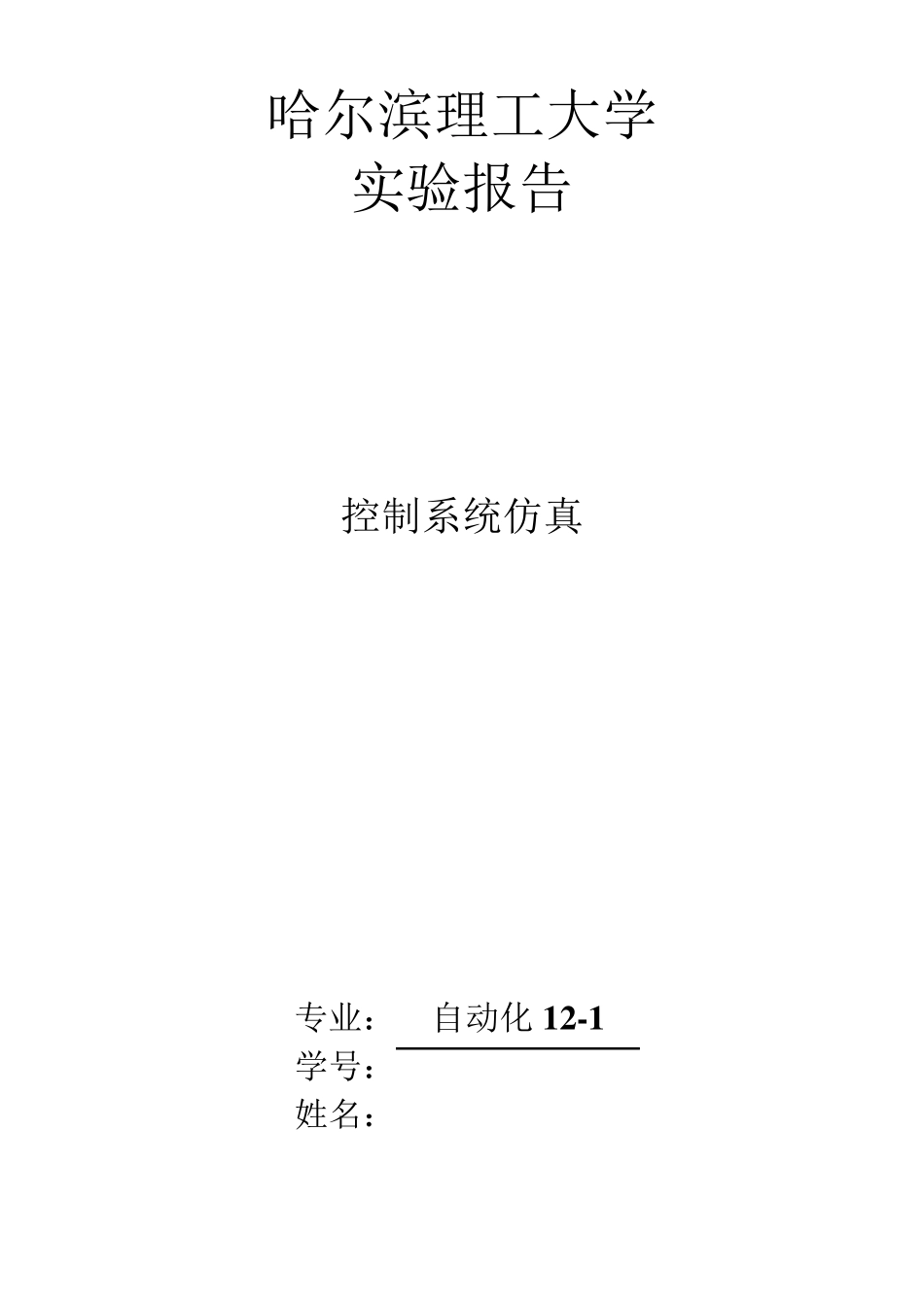
四.实验结果分析: 1
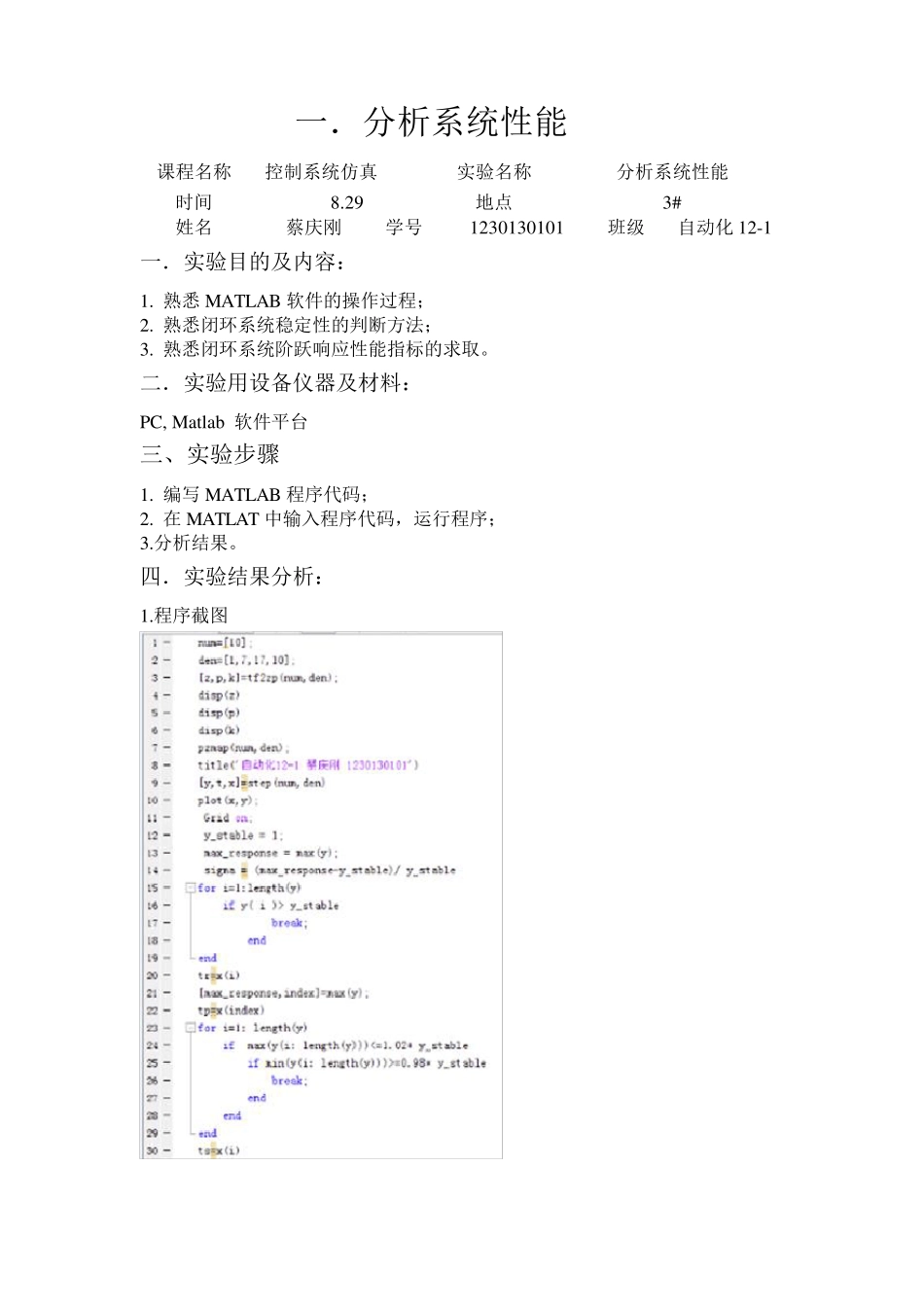
程序截图 得到阶跃响应曲线 得到响应指标截图如下 2
求取零极点程序截图 得到零极点分布图 3
分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0 的极点,如果有系统不稳定
有零极点分布图可知系统稳定
二.单容过程的阶跃响应 一、实验目的 1
熟悉 MATLAB 软件的操作过程 2
了解自衡单容过程的阶跃响应过程 3
得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为1( )0
5G ss和51( )51sG ses,试在Simulink 中建立模型,并求单位阶跃响应曲线
三、实验步骤 1
在 Simulink 中建立模型,得出实验原理图
运行模型后,双击 Scope,得到的单位阶跃响应曲线
四、实验结果 1.建立系统 Simulink 仿真模型图,其仿真模型为 2 .过程阶跃响应曲线为 三.单容过程的阶跃响应 一、实验目的 1
了解比例积分调节的作用; 2
了解积分调节强弱对系统性能的影响
二、实验内容 已知控制系统如下图所示,其中01(