电气与自动化工程学院 控制系统设计与仿真实验报告 姓 名: 裴加坤 专 业: 自动化专业 学 号: 3010203234 同 组 者: 汪志华 赵昌通 宋轶楠 (1) 了解Matlab的使用环境,掌握基本的Matlab编程语法和语句; (2) 了解Simulink的使用环境,掌握Simulink的模块化编程步骤; (3) 对所有过程控制系统对象进行分析,分析所有参数的变化情况; 控制对象共分为单容和多容对象,其平衡特性分为自衡和非自衡以及滞后等过程,这里主要对单容和多容在自衡和非自衡的条件下进行研究
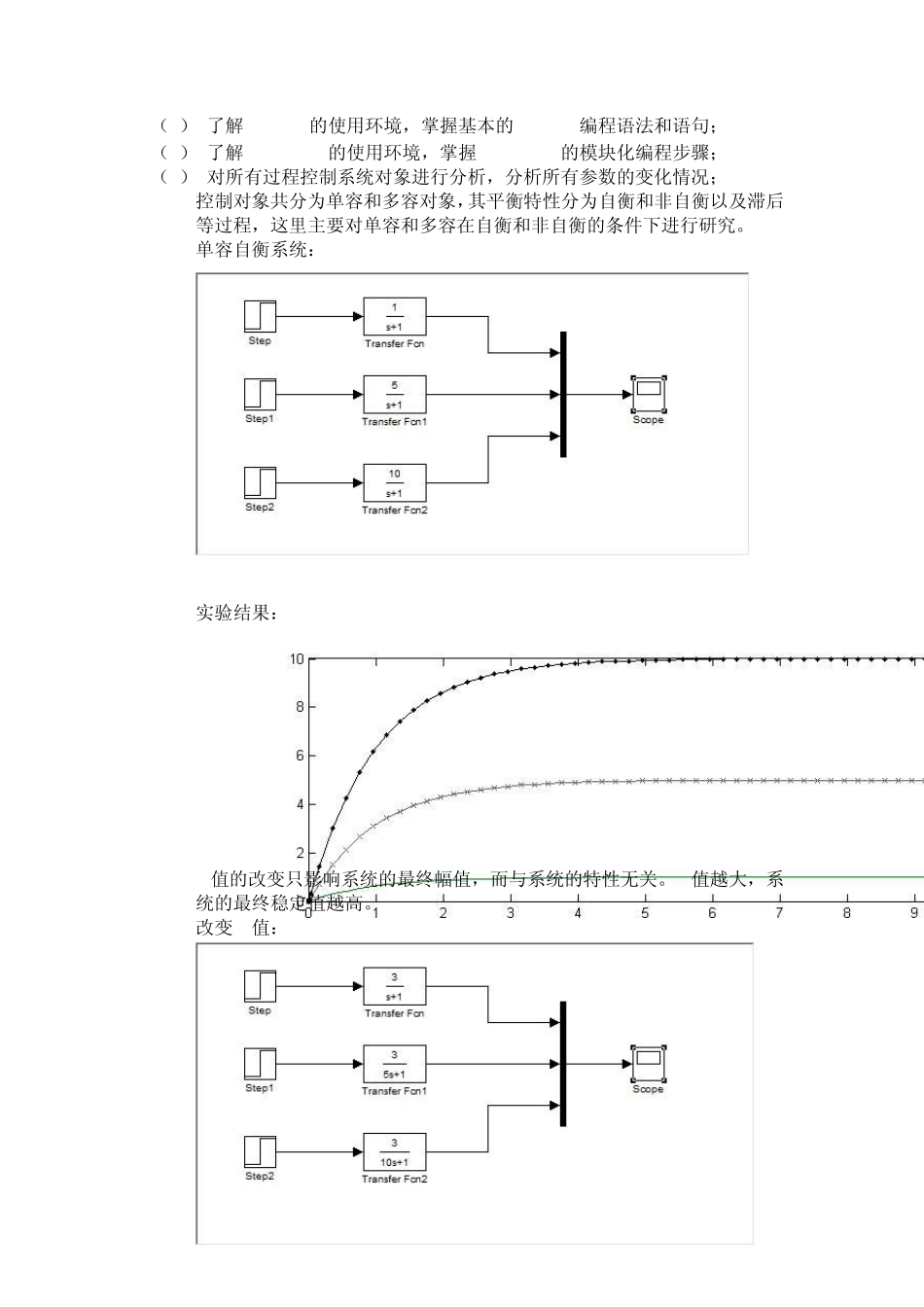
单容自衡系统: 实验结果: K值的改变只影响系统的最终幅值,而与系统的特性无关
K值越大,系统的最终稳定值越高
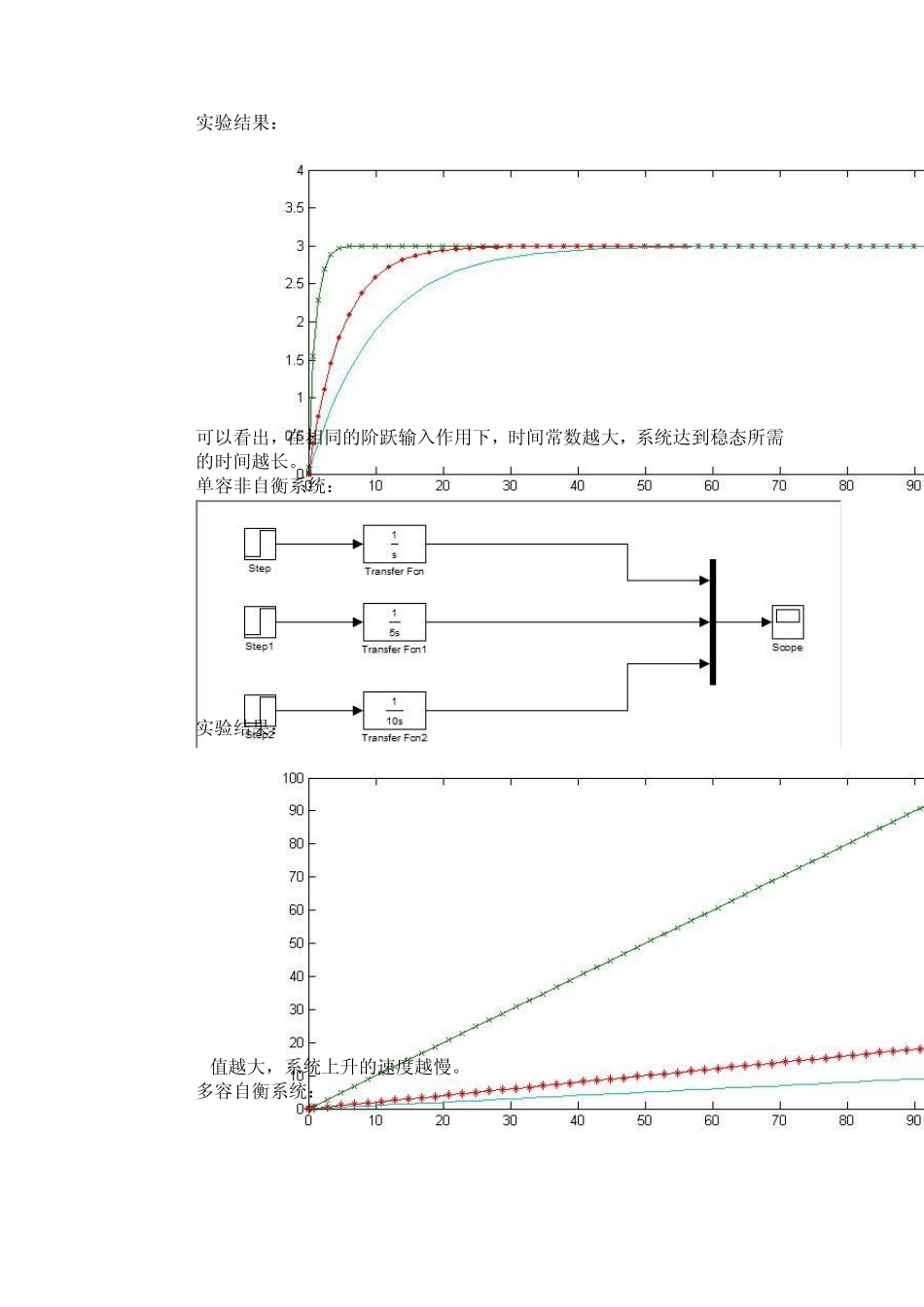
改变T值: 实验结果: 可以看出,在相同的阶跃输入作用下,时间常数越大,系统达到稳态所需的时间越长
单容非自衡系统: 实验结果: T值越大,系统上升的速度越慢
多容自衡系统: 实验结果: 多容非自衡系统: 实验结果: 自衡系统最终会达到稳定,T值的不同,系统达到稳定的时间也不同
非自衡系统不会达到稳定状态
(4) 对单回路控制系统的四个部分进行详细仿真; 执行器: 由图像可以看出,时间常数较小的执行器对偏差变化的响应速度较快,并且不会产生较大的超调
被控对象: 被控对象参数设定不同,系统响应的曲线也不同
检测变送: 设定检测变送环节的比例系数,由图像可知,系统输出与变送器的比例系数成反比
(5) 深入理解PID控制的原理; 比例、积分、微分控制简称PID(Propotional-Integrate-Differential)控制,它是工业生产过程中最常用的控制算法
PID控制具有原理简单、适应性强、控制效果好的特点
理想的模拟式PID控制算法为 (6) ])()(1)([)(0dttdeTdtteTteKtuDtIp 式中Kp——比例放大系数;