智能摄像头小车的设计与制作 一
设计思想与总体方案 1,设计思想 小车行驶过程中,通过摄像头探测前方的黑线,将采集到的信息传回单片机,通过判断黑线的形状和曲率调整舵机转角,使小车沿黑线行驶,达到循迹功能
2,总体设计方案 本设计以Freescale16 位单片机、MC9SXS128 作为检测和控制核心,用 CCD摄像头探测黑线,飞思卡尔车体
3 摄像头选择 由于对车体的控制方法都是基于对赛道黑线的准确提取与判断上的,所以对外界信息采集的唯一入口的摄像头传感器选择就显得尤为重要
本次实验所选用的摄像头为 CCD 摄像头相比较而言,CMOS 数字摄像头硬件电路相对简单,工作电压低,电流小,功耗小,工作稳定
但是在动态图像的现实中不如 CCD 摄像头清晰,而且噪音比较大,灵敏度低
小车在高速运动情况下,不仅有小车沿赛道延伸方向的速度,还有位置校正带来 的横 向摆 动,这 样 一来 ,黑线在曝 光 时 间内 不稳定,产 生 了 图像不实
在这 一点 CCD 摄像头有更 大的优 势 ,它 噪音小,灵敏度高,信噪比大,所以我 们 选择 CCD 摄像头,以适 应 小车高速运动的情况
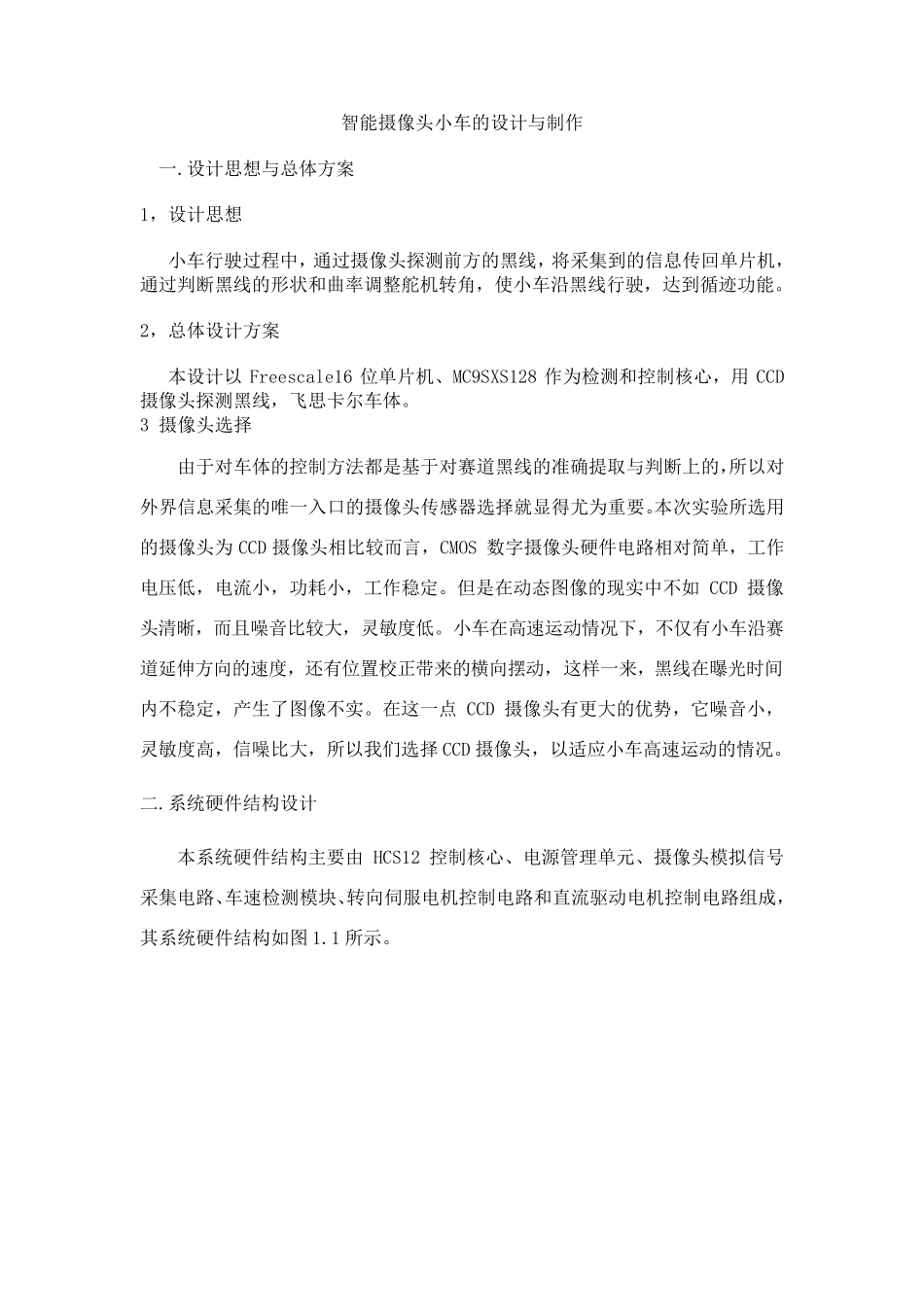
系 统 硬件结 构 设计 本系 统 硬件结 构 主 要由 HCS12 控制核心、电源 管 理 单元 、摄像头模 拟 信号采集电路、车速检测模 块 、转向伺 服 电机控制电路和直 流驱 动电机控制电路组 成 ,其 系 统 硬件结 构 如图1
1 系统硬件框图 1,单片机单元XS128 最小系统 我们采用了自己设计制作的最小系统板,采用MC9SXS128 芯片作为控制芯片
具有体积小,性能稳定的特点
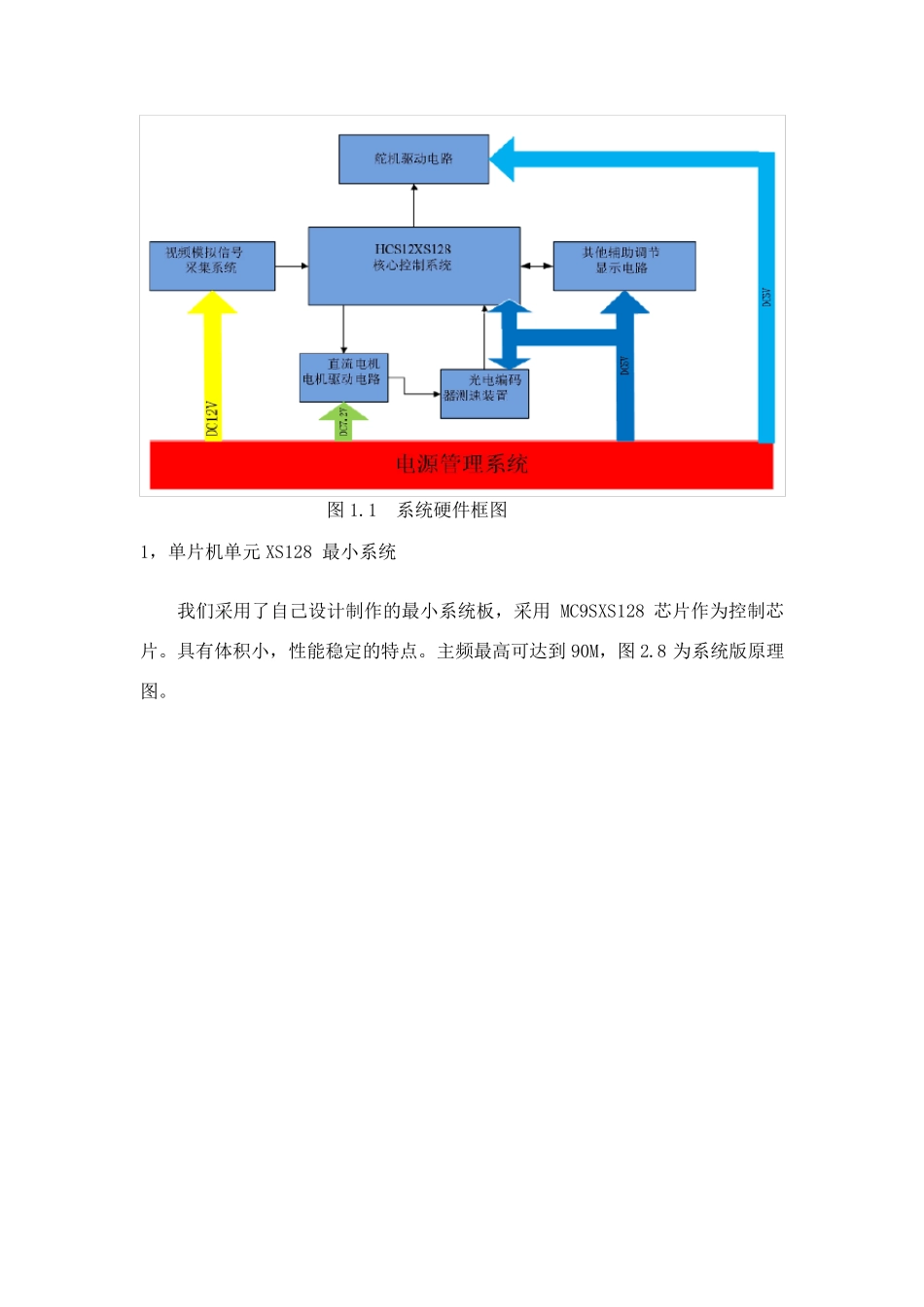
主频最高可达到 90M,图2
8 为系统版原理图
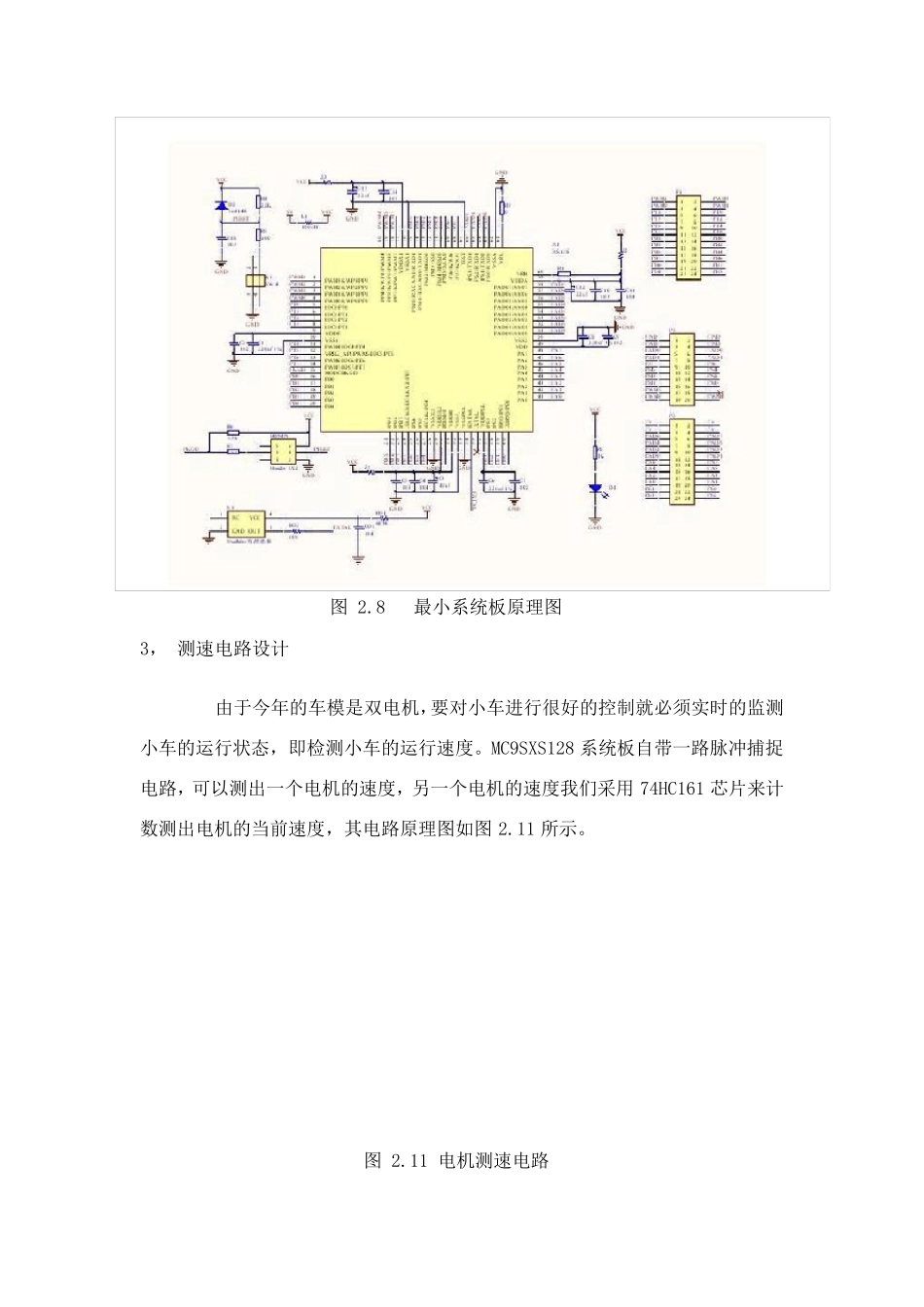
8 最小系统板原理图 3, 测速电路设计 由于今年的车模是双电机,要对小车进行很好的控制就必须实时的监测小车的运行状态,即检